研究
・進捗無し
就活
・パナソニック冬インターンES作成中
・日立製作所録画面接対策

研究
・進捗無し
就活
・パナソニック冬インターンES作成中
・日立製作所録画面接対策
研究
進捗なし。dockerをちょっと触った。
就活
・日鉄ソリューションズ1Dayインターンシップ&座談会参加
質問
購入してもらったドローン飛ばして勝手に大学の駐車場の写真撮っていいか
B4へ
Pytorch or tensor flowが学べるサイト↓
研究
ドローンが届いた。鏡買います。
研究
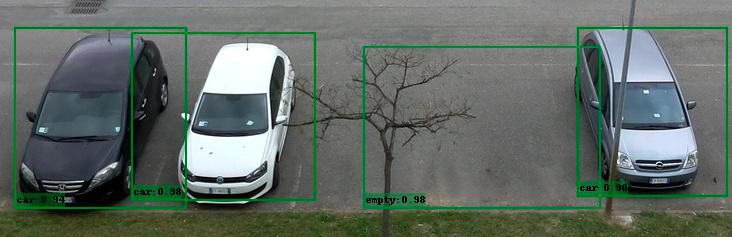
(物体検出の練習)公開されている駐車場のデータセット(先週の進捗参照)を自分でアノテーションして、SSDで学習を行い、推論まで行った。
Precision(適合率)=0.841 Recall(再現率)=0.406
と精度が低かったので、SSDのベースネットのVGG16よりも分類精度が高いResNetをベースネットに持つDSSDを用いて、同様に学習および推論を行った。
Precision(適合率)=1.00 Recall(再現率)=0.60 ちょっと上がった。
早くドローンでデータ撮って学習させたいです!!!!!
就活
・パナソニック懇親会に参加
研究
テーマ:「機械学習とドローンによる屋外駐車場管理システムの開発」
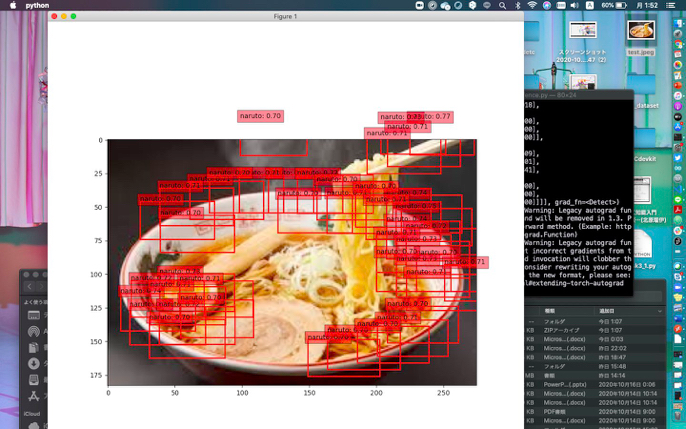
・SSDがオリジナルのデータセットでも動くことを確認↓↓↓
・屋外駐車場の公開されているデータセットを見つけた(http://cnrpark.it/)ので、ドローンが届いて空撮するまでにこのデータをアノテーションして、SSDで学習させ、練習してみます。。。。
就活
・NTT西日本インターン参加中
・日本総合研究所面接(水曜日)対策→TA15時から抜けます!
研究
・Pythonで制御できるドローン(https://store.dji.com/jp/product/tello-edu?vid=47091)
・実際に制御してた記事(https://qiita.com/hsgucci/items/3327cc29ddf10a321f3c)
・使えそうなSSDのコードをgitにpushした
・DLBOXのdockerに入れなくなりました😭
$ docker start ruixlrdp
Error response from daemon: OCI runtime create failed: container_linux.go:349: starting container process caused "process_linux.go:449: container init caused \"process_linux.go:432: running prestart hook 0 caused \\\"error … Continue Reading ››
研究
テーマ:「機械学習とドローンによる屋外駐車場管理システムの開発」
1、ドローンによる空撮で、駐車場の空きを監視する→定点カメラでは死角ができる可能性があるので効果的だと考えた。
2、駐車券にQRコードなどをつけて、スマホで読み取って、ドライバーに空き状況がわかるようにする。→ドローンによる誘導も考えたが、連続して車が入ってきた場合にドローンを複数台用意しなければならないと考えた為。
就活
・SPI勉強中
・NTT西日本インターンシップ参加中→お昼からフィードバック面談あるので途中でゼミ抜けます
・ES結果待ち:日鉄ソリューションズ、SCSK
・コーディングテスト結果待ち:日本総合研究所
毎日お酒飲んで健康に過ごしてます。
東芝テックのインターンがあるので明日から静岡行ってきます。
平尾台でドローンを飛ばした。張先生と鍾乳洞に入った。
大日本印刷ワンデイインターンに参加した。
研究
データを収集するのにドローンを使うのは良いが、運用に当たってはドローンより定点カメラ(監視カメラ)の方が良さそうなので行き詰まっています。。。。。。。
就活
東芝テックがオフラインであるので行ってきます。
アドソル日進の説明会に参加予定