During this week, I thought about the next work direction. The demands for autonomous driving are multifarious,only 3D detection may not maintain the requirements. I want to expand multi-tasks for my work.
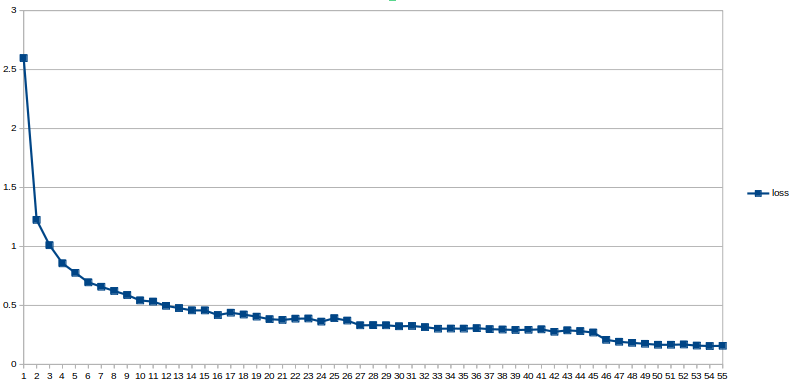
The improved centernet based 3D detection. The training result is shown below, on the BEV AP is not so good as the base line. I am now thinking of the reason.
I modified the centernet 3D detection program this week. I want to change the orientation yaw regression methods. The original methods made the orientation yaw into 8 variables, which is a very complex method. Why not use the more normal and simple ways to made the yaw into 2 variables, in polar coordination … Continue Reading ››
I researched the monocular 3D object frameworks, especially the keypoint-based functions: CornerNet and CenterNet.
The CenterNet 3D object detection used the CornerNet keypoint detection backborn(Hourglass network), which shows a great performance on keypoint detection. I want to make some improvements on the orientation detection, which used 8 variables in CenterNet. … Continue Reading ››
Last week,I try to make 3D object detection jobs on Monocular camera, not using lidar datas.
I read some monocular papers and tried some opensource programs. I used the my own experiment data to do some test experiments on centernet, which is also a monocular camera based open program. The … Continue Reading ››