今週の課題
- 道路にマーカーをつけた状態で、マーカー検出から射影変換を試す
- Raspberry Piに、センサと測定用のプログラムを組み込む
12月15日
1. 進捗はありません
2. 進捗はありません
12月16日
1. マーカー検出の方法を考案中
2. Raspberry Pi用のプログラム作成中
12月17日
全体ゼミのための、発表資料を作成中
12月18日
1. 進捗はありません
2. Raspberry Pi用のプログラムを作成中
12月19日
1.進捗はありません
2. 新しいRaspberry Piが届いたので、動かしてみた
12月20日
12月21日
今週の課題
- 道路にマーカーをつけた状態で、マーカー検出から射影変換を試す
- Raspberry Piに、センサと測定用のプログラムを組み込む
12月8日
1. 道路の四箇所にマーカーを設置し、そのマーカーからを基準に、射影変換を行う
2. 進捗はありません
12月9日
1. 進捗はありません
2.センサの選別
12月10日
1. 進捗はありません
2. Raspberry PiにOpenCVのプログラムを組み込む方法を検討
12月11日
12月12日
12月13日
12月14日
今週の課題
- 射影変換のパラメータ自動決定の手法を試してみる
- Raspberry piで、今の速度測定装置を動かしてみる
12月1日
1. 道路の一定の範囲にLEDなどの目印を設置し、画像で検出、その位置を射影変換のパラメータにする方法を試してみる。設置が容易であることという部分が少し弱くなるが、自動的にパラメータを決めるためには、目印が必要だと思われる。実際の道路にLEDを設置して、画像上で検出できるか試してみる。
2. Raspberry Pi内で、opencvなどが動くか?、また動作速度がどのくらいになるかを確かめてみる必要がある。
12月2日
1. 進捗はありません
2. Raspberry Pi用のシステムを開発中です
12月3日
1. 進捗はありません
2. 進捗はありません
12月4日
1. 進捗はありません
2. Raspberry Pi用のシステムを開発中です
12月5日
1. 進捗はありません
2. Raspberry Pi用のシステムを開発中です
12月6日
12月7日
今週の課題
- 射影変換のパラメータを自動で決定する方法を考える
- 撮影用のモデルを作成する
11月24日
進んでいません
11月25日
1. 自動化の方法を検討中
11月26日
1. 進捗はありません
11月27日
1. 進捗はありません
11月28日
11月29日
11月30日
テーマ
画像処理を用いた車両速度測定システムの開発
今週の課題
- Raspberry Piで撮影した車両の画像から、射影変換の自動化を考える
- Raspberry Piを用いた撮影のための、道路と車のセットを作成する
11月17日
1. Raspberry Piを用いて夜間での撮影を行ってみた。はじめは光を取り込みすぎて線として写らなかった。そこでカメラの光をとらえる感度値をあらわすISO感度を下げてみた。結果、上手く光の線を捉えることが出来た。
 Raspberry Piを用いた車両画像
そして、射影変換から光の線を抽出した結果が、下図になる。
Raspberry Piを用いた車両画像
そして、射影変換から光の線を抽出した結果が、下図になる。
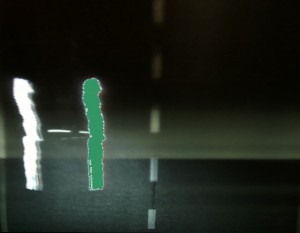 射影変から光の抽出
上手く、線を抽出することが出来ている。
このときの速度が75.6[km/h]であった。
射影変から光の抽出
上手く、線を抽出することが出来ている。
このときの速度が75.6[km/h]であった。
11月18日
1. 射影変換の点と位置と、画素数における、精度の関係について、画素数を変化させて検証を行った。読み込んだ画像の画素数から射影変換のパラメータを決める際、画素数の数が多いとパラメータの精度が上がるが、目視でパラメータの位置を決めることが難しくなる。
射影変換後に白線の長さを検出し、そこから射影変換の精度を評価し、繰り返し計算を行ってパラメータを決定する方法を考える。
11月19日
1. パラメータの取り方について検討中
11月20日
2. 模型の作成について、シスエレ実験で使用していた、列車を使用してみることにした
11月21日
1. パラメータの取り方について検討中
11月22日
工大祭
11月23日
工大祭
テーマ
画像処理を用いた車両速度測定システムの開発
今週の課題
- Raspberry piを用いて、シャッタースピードを変化させた画像を撮影する
- Raspberry piを単独のカメラとして動作させるようにする
- 実際に車両を撮影して検証する方法を考える
11月10日
1. シャッタースピードを変えるコマンドを探した
2. できていない
3. 簡単な道路と車の模型を作成し、その上で車にライトをつけて動かすという方法を考えた。ライトと動く車は必要であるが、検証が楽になると考える。
11月11日
1. Raspberry Piとカメラで写真を撮っていたら、"Received unexpected camera control callback event, 0x4f525245"、というエラーが出て写真が撮れない状況になった。同じ症状の人がネット上で見つかったが、ソフトのアップグレードや、カメラの繋ぎ直しなどの解決方法しか提案されていなかった。
2. できていない
3.できていない
11月12日
1. 解決案を試したが、やはり解決しなかった。別のRaspberry Piで試してもカメラが起動しないようであれば、カメラが壊れた可能性がある。もし、動けば、自分のRaspberry Piが原因なので、OSからインストールし直す必要がある。
3. Raspberry Piで撮影するためには、スイッチを付けなければパソコンからコマンドを送信しなければならない。ただ、一度は外でシャッタースピードを変更して撮影する必要がある。微調整については、模型を作成する方法がベストだと考える。
模型に必要な、ラジコンカーなどを持っている方がいれば、よろしくお願いします。
11月13日
1. Raspberry Pi用のOSを再インストールしたり、ネットに載っている対策を試してみたがやはりエラーが治らなかった。別のRaspberry Piにカメラをつないで試してみたところ正常に動作したので、カメラよりも、Raspberry PiとOSの問題の可能性が高い。別のRaspberry PiにOSの入っているSDカードを挿して動作した場合は、Raspberry pi自体に問題がある可能性がある。
2. 進捗はない
3. ラジコンカーを楊先生から借りれることになったので、模型を作っていく。
11月14日
1. 別のRaspberry Piで試してみたところ、カメラは正常に機能した。Raspberry Piに問題があると考えられる。別のカメラでシャッタスピードを調整するコマンドを追加して撮影すると、うまく撮影することができた。次は、実際に道路で試す必要がある。
11月15日
1. Raspberry Piを用いて、夜間走行中の写真を撮影してみた。シャッタースピードを1秒に設定して撮影を行ったが、光を取り込む量が多く、光の塊のように写ってしまった。線として撮るには、カメラの感度を調節する必要がある。
テーマ
画像処理を用いた車両速度測定システムの開発
課題
1. Raspberry Piのカメラモジュールについて学ぶ
2. 撮影環境と条件について考える
3. カメラモジュールを用いて車両を撮影する
11/3
できなかった
11/4
1. カメラモジュールを接続して撮影を行った。画像の取得には成功したが、撮影後にRaspberry piがフリーズするという問題が発生した。調べてみると他にもこのような症状が出ている人の投稿があったが、解決策は分からなかった。
2. リモート接続で撮影した画像を、ホストPCに転送することができたので、Raspberry piで撮影した画像をPCに転送して処理するという流れはできそうである。撮影時にセンサなどで車両の接近を調べる予定だが、使用するセンサなどを考える必要がある。
また、埼玉県で新しく移動式のORBISが試験運用されることがわかった。レーダ式を用いてるが、かなり小型になっており、設置条件などで、メリットを出す必要がある。
11/5
1. 他の人たちの症状では、カメラが起動後フリーズして、画像の取得もできないという症状だった。しかし、自分の症状は、フリーズした後、再起動すると画像自体は生成されていた。カメラとRaspberry piで使用する電源では800[mA]と書いてあったが、供給している電源が600[mA]ということが原因の可能性がある。
11/6
1. 電源を1[A]に変えると、うまくカメラが作動した。撮影画像は、raspberry piにインストールしたsambaを用いて共有フォルダを作成して、そこに画像を作成して、パソコンで取得する形をとる。
2. 電源を用意して、raspberry piを単独で動かせるようにする必要がある。道路の正面に設置し、センサで車両の接近を感知したらraspberry piに撮影のコマンドを送信する。
11/7
11/8
11/9
テーマ
安価なカメラを用いた画像処理による車両速度測定システムの開発
今週の課題
- 射影変換の精度を改善する
- 射影変換に変わる新たな手法を試す
- 射影変換と新しい手法の精度を比較する
10月27日
1. 射影変換のパラメータが間違っている可能性がある。道路の白線を基準に、白線の長さが射影変換後も同じになるように調整してみる。
2. 道路の幅は、撮影画像の道路の長さに比例して短くなる。これを線形の式で表した。この式は、撮影画像の道路の長さと、奥行きによるpixelの長さの減少率に応用できると考える。この考えを用いて光の線の長さを計算してみる。
10月28日
1. できなかった。
2. 新たな手法で必要な情報として、光の線の画像上の座標、線の長さ、道路の長さを求めた。計算式をわかりやすくまとめなおしたので、あとは計算してみる。
10月29日
1. できなかった
2. 手法についてまとめ、発表資料のチェックを行った。
10月30日
1. 射影変換のパラメータを、今の時点では4点取っているが、多くすることで精度を安定させる。また、パラメータの位置を正確に取る必要がある。
2. 新たな手法を検証した結果、y軸のpixelの長さを求める式に誤りがあった。画像の1pixelの横の長さを、実際の道路に投影した時の長さの変化の比率と、縦軸の長さを実際の道路に投影した時の変化の比率が同じと仮定していた。しかし、y軸では、カメラの角度により、そのままpixelの長さを拡大して投影しても誤差が生じる。そこを考慮に入れていくと、確かに射影変換と同じ原理になる可能性がある。まずは、射影変換の過程を学び、そこから、射影変換の精度改善と、パラメータの導出方法を考える。
10月31日
1. 射影変換のパラメータを8点に増やしてみた。結果の画像が下の画像になる。
 射影変換結果(パラメータ8点 2300×1700)
射影変換結果(パラメータ8点 2300×1700)
道路の白線を見てみると、かなり等しくなっている。しかし、この8点も自分でパラメータの値を画像上をクリックして与えている。今回は、自分で、道路に線を引いてみて、白線同士で対応する点を目視で決め、白線の長さを5[m]として、変換後の対応点を計算している。これを自動でするためには、プロセスとして
- 道路の場所と、白線を検出
- 左の白線から4点の座標を取る
- そこから、右の白線に平行に対応している座標を取得して、8点とする
- 取得した8点の座標の変換後の座標を計算する
となる。
しかし、撮影画像の道路の横軸は平行になっているとは限らず、左の白線の座標に対応する右の白線の座標が、真横になってはいない。また、変換後の座標計算も、画像上に長さの基準となるものがなければ計算することができない。
道路の真ん中の白線が基準にはなるが、そこを上手く抽出して、パラメータに用いることができるか検証する必要がある。
2. 射影変換について調べた結果、新たに考えていた手法に画像の縦軸のカメラの角度を考慮しようとすると、射影変換とほぼ同じ考え方になる必要があることが分かった。
3. パラメータを増やせば、射影変換の精度が向上することが分かったので、まずは射影変換を用いていく。ただし、正確なパラメータの決定は、まだ問題がある。
11月1日
11月2日
テーマ
画像処理を用いた車両速度測定システムの開発
カメラの仕様の確認と、購入を行う
射影変換に変わる、線の長さを計算する手法を考える
10/20
1. カメラの公式ホームページの仕様で、シャッタースピードに関する項目があった。ただし、使い方を紹介しているサイトのcommand紹介のページで、シャッタースピードに関する項目がなかった。
2. カメラからの距離y[m]での、道路の線の幅x[m]としたとき、線形になると考えられる。その線形の式を、道路からの距離y[m]と、奥行きとして考えたpixelの長さの減少率での式に置き換えてみる。
10/21
1. 進まなかった。
2. 進まなかった。
10/22
1. 進まなかった
2. 進まなかった
10/23
1. 進まなかった
2. 進まなかった
10/24
1. 進まなかった
2. 進まなかった
10/25
1. カメラを調べた結果、最近のRaspberry Piのカメラモジュール用のライブラリには、シャッタースピードを変更できる関数があった。しかし、範囲が1/30[s]あたりと書いていたので購入してみて、調整を行う必要がある。
2. 全体ゼミの発表に備えて、新たに考えた手法をパワーポイントでまとめてみた。同時に、これまでの背景を見直して、自分の研究テーマの長所をまとめなおした。
10/26
課題
- Raspberry Piで、プログラムを動かす
- カメラを購入し、Raspberry Piで動かす
- 射影変換で、車両の高さが及ぼす誤差値を計算する
10/14
1. Raspberry Piはまだ動かしていない。
2. カメラの選定中。
3. 車両のヘッドライトの高さを0.5[m]と仮定して、シミュレーションを行ってみた。今の方法では、ヘッドライトが道路と同じ高さであると仮定して射影変換を行っている。そのため、射影変換から計算する光の線に、若干の誤差が生じている。
今回撮影した画像の環境を仮定して計算したところ、約0.88[m]、時速に置き換えると約時速3.2[km/h]の誤差が出ていた。
10/15
1. 研究室のサーバでは、Raspberry PiにIPアドレスでログインすることが出来なかった。そこで、PCとRaspberry Piを直接Lanケーブルでつなぎ、共有ネットワークにすることで、Raspberry Piにsshでログインできた。
2. Raspberry Pi専用のカメラがあるので、そのカメラがシャッタースピードなどを設定できるか調査中
3. 誤差について検証中
10/16
1. ネットがつながらなかったので、Raspberry Piを使用していない。
2. 調査中
3. 射影変換では、誤差が出ていることが判明。誤差率について計算中であるが、ほかの方法も検討中。
10/17
授業レポートを行った。
1. 使用していない
2. 調査が出来なかった
3. 道路自体を抽出出来れば、その道路の幅が短くなっていく比率が計算できる。その比率を、画像の縦のpixelの変化率に応用で出来れば、ある地点の光の長さが計算できる可能性がある。
10/18
10/19
10/20
Stay Hungry, Stay Foolish!
