
課題
- Raspberry Piを動かしてみる
- Raspberry Piで使えるカメラについて調べる
- 学会で指摘された、測定や、射影変換に誤差がないかという問題に対処する。
10/7
1. Raspberry Piに自宅の有線Lanからログインして起動を行ってみた。sshコマンドで遠隔ログインを行い、Macアドレスを取得できた。今後様々なプログラムを動かしてみる。 2. カメラはRaspberry PiのModel Bなら使えそうである。シャッタースピードを変更するためのコマンドも用意されているようなので、どのカメラを購入するか検討を行ってみる。 3. 対処方法として、道路の白線などの長さがはじめから分かっている物体と一緒に、車両を撮影してみる。光の線を含んだ範囲で射影変換を行い、その長さが分かっている物体と比較して精度を検証してみる。10/8
1. Macアドレスの登録を行ってもらうようにお願いした。 2. まだカメラの選定が行えていない。 3. 進展はなかった。10/9
1. まだ、研究室のパソコンでログインが行えていない。 2. カメラについては調べられなかった。 3. 陳さんとお話して、射影変換では、pixelの分解能が場所によって変わり、誤差が大きくなる可能性があることが分かった。実際に画像をリサイズして射影変換を行ってみた。
2300×1700
450×350

300×200
10/10
実家に帰省しています。10/11
実家に帰省しています。10/12
実家に帰省しています。10/13
実家に帰省しています。今週の課題
目標:画像処理による車両移動装置の開発
今週:使用するRaspberry Piの選定と使用法を学ぶ 学会発表で受けた質問- 結果の精度調査
- pixelの距離はすべて同じか?
- 平行にカメラを設置した方が簡単ではないのか
- 光の線の長さにノイズは入っていないのか?
- 光を消した車両がきた場合は?
- カメラのシャッタースピードは本当に正しいのか
- 昼間用のシステムの開発
- カメラを用いて自動で撮影する装置の開発
10/1
Raspberry Piを調べてみた。カメラを用いて撮影や、ある程度の操作は可能みたいであるが、複雑な処理はやはりパソコンに画像を送信してから判別するべきだと考える。 車両の接近はセンサを用いようと考えているが、どのセンサを用いるべきか検討していく。10/2
Raspberry Piの上でOpen cvを動かしている人のブログなどがあった。 Raspberry Pi専用のカメラを用いて簡単な画像処理を行っていたので参考にしてみる。10/3
Raspberry Piを調べていくと、lanケーブルを接続してネットを使って別のパソコンからログインできることが分かった。 これを利用して、Raspberry Piにカメラをつけて車両を撮影し、画像を処理用の別のパソコンに送信して速度を計算するための処理を行うようにできると考える。研究室の有線lanに接続してログインができるか調べたが、IPアドレスを取得する必要があるので方法を考えていく。10/4
10/5
10/6
Raspberry Piをお借りできたので、OSのインストールから初期設定を行っていこうと思う。 IPアドレスは、固定のアドレスを割り振ってくれるということなので、まずはネットを使わずにRaspberry Piを起動してMacアドレスを取得する。 Macを使ってOSのインストールを行うので専用のソフトを探している。今週までにRaspberry Piの使用方法を学び、使用するカメラについても調べる予定。10/7
Raspberry Piに自宅の有線lanを使いログインして起動してみた。 Macアドレスを取得できたので、今後は様々なプログラムを動かしてみる。学会発表に向けて
学会発表の準備
学会発表に向けて産業応用とICISIP2014の発表資料を作成した。 両方ともpptで14枚くらいになった。 9月23日の留学後は、すぐに発表練習を行う。ICISIP2014と産業応用工学会
ICISIP2014
以前は、横から車両を撮って速度を測定するというシステムだった。 ICISIPの方では、正面や斜めからでも撮影して速度を測定できるように改良して検証した結果までをまとめて、論文を作成した。産業応用工学会
産業応用では、斜めから撮影し測定可能であることを検証に証明したことをまとめた。 両論文では、検証時に、比較用の正確な車両の速度を得ることが出来ないという問題が生じている。今後、検証方法を改めて考える必要がある。 そして、昼間用の方法を開発しスマートフォンのカメラで実装可能まで行う予定である。今後の予定
- 8月の中旬までに、学会発表用の資料を作成する。
- 留学中に、できれば現地の方に協力してもら発表練習を行う
- 9月の留学後に、学会発表の練習を行い学会に出席する
車両の撮影状況の変更と抽出法の改良
撮影環境の変更
撮影環境を真横や正面から斜めまで対応した。 そのかわり,撮影時に撮影範囲の道路の長さをあらかじめ測定する 必要がある。 斜めから撮影した画像がしたの画像である。 斜めからの画像
斜めからの画像
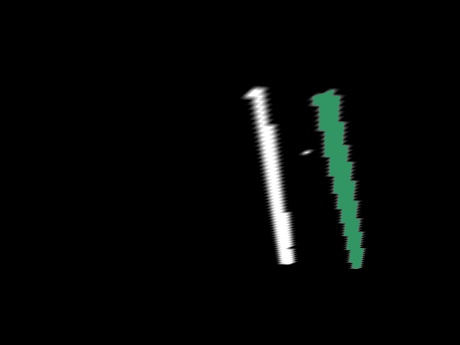
正面から撮影した車両の抽出

撮影した車両の光の線を学部時のシステムで抽出
重み付きヒストグラム自体が上手くできず、マスク処理にも失敗。 畳み込み積分時のヒストグラムとガウシアン関数の配列に原因があると思われる。 以前まではopencvのDFTを用いた畳み込み積分を行う際、配列の長さを自分で調整していた。 そのため、ヒストグラムの255の値まで畳み込みが行われていない可能性がある。畳み込み積分と、閾値決定の改良
opencvのフーリエ変換と畳み込み積分のために最適な配列の長さを求める関数を使用した。 これにより、重み付きヒストグラムを出すことが出来た。
 |
 |

 … Continue Reading ›› … Continue Reading ››
撮影状況の変更と今後の予定進捗カメラを問い合わせたところUSBポート3.0では正常に動作しない場合があると言われた。 mac miniのUSBポートはすべて3.0の規格でありこれが原因で動作がうまくいかないと思われる。 カメラの設定は後回しにしてカメラの撮影状況の変更と抽出法の改善を行う。 撮影を車両の正面から行ってみた
撮影自体は上手くいった。横から撮影していた時は、タイミングによって光の線が上手くできなかったが正面からだとかなり上手く光の線ができた。この線を抽出し長さから速度を測定するプログラムを作成してみる。
予定
cameraについてやったことIS3C2014に出席して発表を行った。 研究室にあったカメラのドライバをインストールして使用してみた。 研究室にあったMCM4303のカメラを使ってみたが、ドライバに入っていたソフトではシャッタースピードを設定することが出来なかった。そこで、自分でそのカメラのライブラリをインストールして自分作成してみる。 使用するカメラはMCM4303 IS3C2014の準備IS3C2014プレゼンテーションの準備と発表練習を行った。 いろいろなアドバイスを元に再度プレゼン資料と発表内容の修正を行った。研究B4で作成していたスピード測定システムはVS2010のコンソールアプリケーションで作成していたので、それをフォームアプリケーションに作り直した。進捗:ボードカメラの選定、英語訳ボードカメラの選定条件
ゼミでの英語訳Jaworksi とPeake1はとても静かに飛行する鳥の更なる秘密を解き明かすための前向きな努力の中で、ふくろうの羽の更なる精密な調査の間数学モデルの改良を続けています。 研究者はさまざまなふくろうの羽の特徴を研究し始めてもいます。これには通常ハトのような騒がしく羽ばたく鳥の羽とされているものは含まれていません。特に興味を持たれているエリアとしてふくろうの羽の表面であるうぶ毛でおおわれた素材がある。外皮の下は数学的にモデルにすることが難しいが、大部分はありふくろうの静かな飛行のためのほかにない重要になるかもしれない。Stay Hungry, Stay Foolish! |

