(今週の課題)
CamShiftによる2オブジェクトの追跡プログラムを完成させる
(進捗状況)
10/27(月)
プログラムのバグがあり、動作しない。
10/28(火)
引き続きバグの修正を行った。
10/29(水)
大学発表会のため、進捗はない。
10/30(木)
サリー大学発表会と展示会のため進捗はない。
10/31(金)
展示会のため進捗はない。
11/1(土)
明専スクールのため、進捗はない。
11/2(日)
明専スクールのため、進捗はない。
動画像でのHough変換の円検出が問題なく動作したので、11月の目標であるAdaboostでの顔検出の環境作りを行う
画像教本3章と4章を読む
TOEICの勉強をする
10/27
進捗はありません
3-3まで読みました
参考書を選んでいます
現段階での円の検出状態の動画のリンクを貼っておきます
円検出 動画1
10/28
進捗はありません
3章を読み終わりました
進捗はありません
10/29
静止画像から指定した座標周辺の空間領域を切り出すプログラムを組み、動作することを確認しました。次は円を検出した座標周辺の空間を切り出せるようにプログラムを組んでいきたいと思います。
進捗はありません
進捗はありません
10/30
円の中心座標検出について調べています
4-1を読みました
リスニングをしました
10/31
円の中心座標検出について調べています
4章を読み終えました
進捗はありません
11/1
進捗はありません
11/2
進捗はありません
進捗はありません
単語学習をしました
11/3
進捗はありません
10/20-10/21 「Based on the co-occurrence matrix texture feature extraction」という文章を読みました。
10/22-10/23 「Analysis of experimental results about gray co-occurrence matrix to extract the texture features 」という文章を読みました。
10/24 魚の周辺領域を切り出して、それぞれの画像に対して同じサイズになるように調整しました。
10/25 画像に対して4つの特徴量を抽出し整理しました。
1日(土) 午後:懇談会
2日(日)
3日(月) 文化の日
4日(火) 午前:会議
5日(水) 午前:講義、午後:会議
6日(木) 午後:ゼミ、会議
7日(金)
9日~12日 海外(揚州大学)
13日(木) 午後:ゼミ、会議2件
14日(金)
10月の予定 (投稿の練習を兼ねて)
10/24(金) 午後:PBL実験
10/27(月)午前:山脇ゼミ
10/28(火) 午後:産業応用工学会 理事会
10/29(水)午前:福工大(非常勤)
10/30(木)終日:産学連携フェア(若松)
10/31(金)終日:産学連携フェア(若松)
10/23
曲面の計算を図書館の資料等を参考に行っていた
しかし、あまり思いつかなかったため、明日実際に曲面を作って実験を行う
10/24
曲面の反射板を作成中
一応、反射はうまくいったが、もう少し改良を加える
来週は水曜までに反射板2号を完成、ゼミで意見を聞く
選考中3社
1社目:1次面接を行い、結果連絡待ち
2社目:筆記試験を行い、結果連絡待ち
3社目:11月6日に2次選考
課題
1.光を集光する領域をどのくらい少ない解像度で再生できるかの検証
2.光渦をどの位置でも生成できるアルゴリズムの作成
課題1の検証が終わり次第、課題2に取り掛かります。
10/22
1.現在検証中
2.アルゴリズムの模索中
10/23
1. シミュレーションでの検証では少なくとも5×5[pixel]の白の領域なら光を集光できることがわかりました。
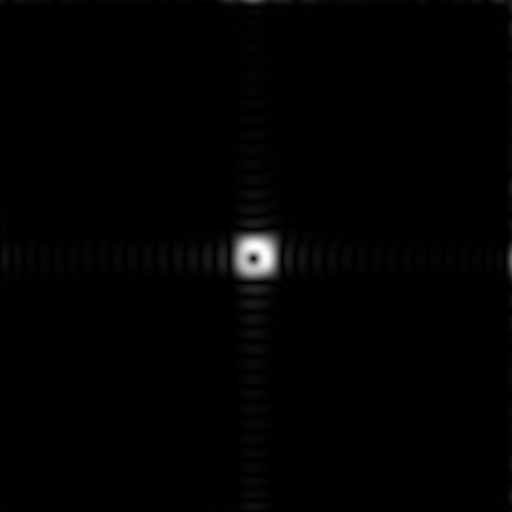
2.5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像が図1となります。
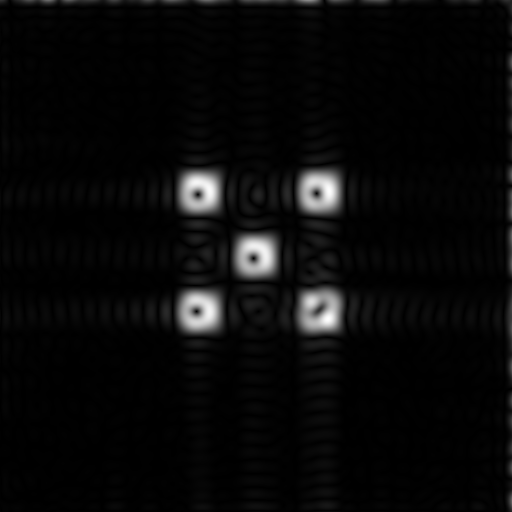
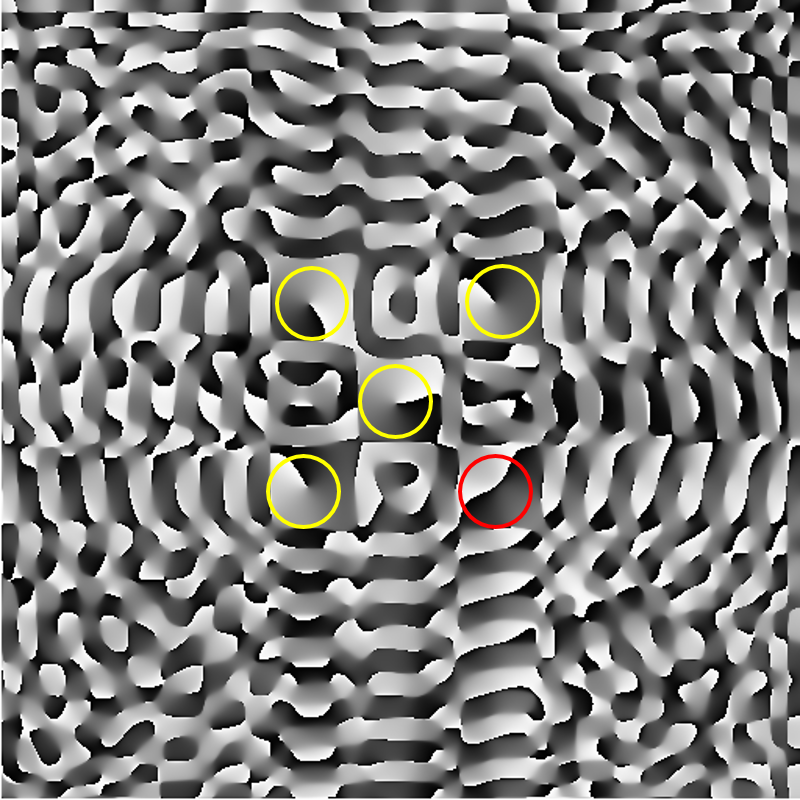
5つの白の領域にそれぞれスペックルを生成した像の振幅分布の画像が図2となります。図3は図2に対応する位相分布です。黄色の丸で囲っているところが光渦に対応している位相です。右下の赤丸で囲った位相をみると黒から白の螺旋状になっておらず、完全な光渦になっていません。今後どの位置でも光渦が生成できるようにアルゴリズムの改良を行います。
図3: 5つの白の領域にそれぞれスペックルを生成した像の位相分布
10/25
1.5×5[pixel]はスペックルを生成する際、バランスが悪いので6×6[pixel]の領域にしました。今後、集光する領域のピクセル数によるスペックル生成の影響を検証する予定です。
2.アルゴリズムの模索中
10/27
2.白の領域がある程度離れている場合に限り、どの場所でも光渦を生成できるようにアルゴリズムの改良を行いました。
位相分布の黄丸の位置の位相が黒から白に色が螺旋状に変化していることから黄丸の位置に光渦ができていることがわかる。
Continue Reading ››
課題
①処理時間検証のためのテストベンチ作成
②プログラムの配列入力方法の変更
10/20
①進捗なし
②プログラムの完成
授業レポートの作成
10/21
①テストベンチ作成中
授業レポートの作成
10/22
①テストベンチ作成中
10/23
①テストベンチ作成中
授業レポート作成
10/24
①テストベンチ作成中
授業レポート作成
ラベリング処理を行い、指の座標を取得する
以上が今週の課題です。
10/20
輪郭をはっきりさせるために、膨張処理をしました。
10/21
内定式のため、進捗はありません
10/22
内定式のため、進捗はありません
10/23
内定式のため、進捗はありません
10/24
進捗はありません。
10/25
進捗はありません。
10/26
ラベリング処理のプログラムを書きました。処理速度が少し遅いため、プログラムの修正を行っています。
CamShiftによる追跡プログラムを書きました。現在は1オブジェクトのみ追跡可能な状態なので、2オブジェクト追跡可能なようにプログラムの修正をしています。
投稿ナビゲーション