目標:
指先の形状検出に関する書籍を読み、サンプルプログラムを作製する。
内定式でTOEICテスト(目標740点)があるので、それに向けた勉強をする。
学会発表で受けた質問
スクリーン下部での精度低下の問題
スクリーンの明るさが明るい場合、反射像が映らないのではないか
座標変換の方法
実行速度はどのくらいか
などがありました。
射影変換の精度の検証を行い全体ゼミで発表します。
修士論文に向けて、指先を認識するプログラムを作成する必要があります。指先の形状検出に関する書籍を読もうと思います。
10月1日
論文を読みました。
手話や指文字認識システム構築に向けた三次元特徴に基づく姿勢変動に頑健な手指形状推定法
澤田秀之, 橋本周司, and 松島俊明. "運動特徴と形状特徴に基づいたジェスチャー認識と手話認識への応用 (< 特集> 次世代ヒューマンインタフェース・インタラクション)."
情報処理学会論文誌 39.5 (1998): 1325-1333.
丸谷誠慶, 西川敦, and 宮崎文夫. "2 次元画像からの指先位置検出に基づく実時間手形状認識と移動ロボット遠隔操縦タスクへの応用."
情報処理学会研究報告. CVIM,[コンピュータビジョンとイメージメディア] 2002.34 (2002): 145-152.
10月2日
TOEICの文法問題を解きました。
10月3日
TOEICの文章題を解きました。
10月4日
TOEICの文章題を解きました。
10月5日
TOEICの文章題を解きました。
10月6日
TOEICのリスリング問題を解きました。
「ステレオ画像からの3次元復元」
学会も終わり、プレゼンや研究にも力不足を感じました。
今週は3次元画像の基礎学習を中心に行い、次のゼミまでに3次元データの扱いに慣れることが目標です。
また研究内容もより専門的なものにすべく、既存の研究を調査していくつもりです。
10/2
OpenCVを使った3次元復元の簡単なプログラムをネットで拾ってきました。
まずはVisualstudio上で描画しようと思います。
10/3
OpenGLを導入しました。
Formアプリケーション上で動かせることも確認しましたので、しばらくはこれで得られた3次元情報を描画します。
10/6
OpenGLによる描画のプログラムを自分の距離測定プログラムへ移行中です。
今週はOpenGLを導入するところまで進めました。予想より時間がかかってしまいましたが、ここからはペースを上げていきます。また、新しい3次元復元の手法についても考案中ですので、まとまり次第報告します。
現在考えているアルゴリズムをプログラムにすること。
概要としては、AR用マーカーの特徴点を、遺伝的アルゴリズム(GA)によって選択するプログラムの作成です。
画像処理教本の1章を読むこと。
研究内容をスライドにまとめること。
以上の三点が今週の課題です。
9/30
1.プログラムを組んだので、処理結果待ちです。詳しいことは3.のスライドで説明したいと考えています。
2.読んでません。
3.研究背景についてまとめました。
10/1
1.処理結果のデータを収集しています。
2.1章。2章2-4-4まで読みました。
3.今日は進めていません。
10/2
1.GAによる特徴点選択のデータ収集が終わったので、精度の検証用プログラムを作っています。
2.読んでません。
3.提案手法についてまとめています。
10/3
1.前日のプログラムは必要なかったので、GAによる特徴点選択プログラムにより得たデータから、さらに有効なもののみを選択するプログラムを作っています。
2.読んでません
3.提案手法についてまとめています。
10/4
1.前日のプログラムが完成し、データも集まりました。スライドには今日までの内容をまとめようと思っています。
2.読んでません。
3.提案手法についてまとめています。
10/5
1.何もしてません。
2.読んでません。
3.スライドを一通り書き終えました。
10/6
1.何もしてません。
2.読んでません。
3.スライドを分かりやすいように書き直しています。
学会発表の準備
学会発表に向けて産業応用とICISIP2014の発表資料を作成した。
両方ともpptで14枚くらいになった。
9月23日の留学後は、すぐに発表練習を行う。
ICISIP2014
以前は、横から車両を撮って速度を測定するというシステムだった。
ICISIPの方では、正面や斜めからでも撮影して速度を測定できるように改良して検証した結果までをまとめて、論文を作成した。
産業応用工学会
産業応用では、斜めから撮影し測定可能であることを検証に証明したことをまとめた。
両論文では、検証時に、比較用の正確な車両の速度を得ることが出来ないという問題が生じている。今後、検証方法を改めて考える必要がある。
そして、昼間用の方法を開発しスマートフォンのカメラで実装可能まで行う予定である。
今後の予定
8月の中旬までに、学会発表用の資料を作成する。
留学中に、できれば現地の方に協力してもら発表練習を行う
9月の留学後に、学会発表の練習を行い学会に出席する
3Dデータの扱いについてです。
これから研究で3Dデータを扱う方もいると思いますが、データの型や使用するソフトウェアを統一したほうがいいと思いました。
ソフトウェアについてはBlenderという3Dデータを扱えるフリーソフトを使おうと思っています。
データの型(拡張子)については最も一般的な.obj を扱おうと考えています。
他に扱いやすい型やソフトウェアがあれば教えてください。
現在の研究テーマについて,精度の向上に関する成果が出たのでそれを論文に書いています。
片田先輩に添削していただき,8/1締め切りの産業応用工学会の大会へ提出予定です。
https://www.dropbox.com/s/6xgbxxmy4z8q8dy/IIAE2014.docx
*Wordで見ると二枚に収まっています。
撮影環境の変更
撮影環境を真横や正面から斜めまで対応した。
そのかわり,撮影時に撮影範囲の道路の長さをあらかじめ測定する
必要がある。
斜めから撮影した画像がしたの画像である。
斜めからの画像
この画像の赤で囲っている範囲で射影変換を行うことによって、光の線の長さ
を求めることが出来る。
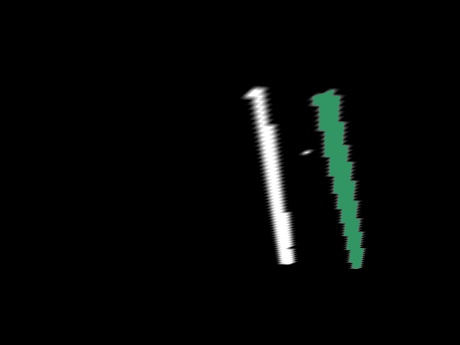
2値化処理 射影変換結果
射影変換したときその範囲の長さが分かっていれば、その長さが射影変換後の画像の高さになる。
現在、Haarlike特徴とadaboostを用いた指先検出方法と、動的背景差分法と色フィルタを用いた指先検出法の比較用の実験データを集めています。
また、ICISIP2014の論文を作成しています。
現在、動的色フィルタに関する論文を読んでいます。
屋外での移動体カメラのための動的色フィルタによる物体検出法に関する研究,
矢野良和
本郷 仁志, 山本 和彦, “動領域内の肌色推定による顔領域および顔部品抽出”,
映情学論, Vol.52, No.12, pp.1840-1847, 1998
D. Chai and K.N. Ngan., “Locating facial region of a head and shoulders color
image”, Proc. of Int.Conf. AutomaticFace and Gesture Recognition, pp.124-129,
1998.
投稿ナビゲーション

 斜めからの画像
斜めからの画像