今週の課題は
1.モーフィングのプログラムを動くようにする
11/17
1.モーフィングのソースコードを陸さんにいただいたのでそれを
visual studio2010で動くように調整中です。
11/18
1.モーフィングのプログラムを動かすことに成功しました。
11/19
1.昨日動いたプログラムはモーフィングではなくクロスディゾルブとして
しか動作していないということがわかりました。
クロスディゾルブとは 2枚の画像間を滑らかに変化させていく際に、形
状の特徴が反映されていないものです。
このプログラムに画素の対応関係を適応させなければならないので
対応点を取得する必要があると思い、二枚の画像の対応点を得る
プログラムを作成しました。
これを昨日作成したプログラムに組み込んでいこうと考えています。
1.修論作成。
2.ラベリング処理を行う。
以上の2点が今週の課題です。
11/17 (月)
修論(アルゴリズムの説明)を書きました。
ラベリング処理のプログラムを動作させました。プログラムの修正が必要なので、現在修正しています。
11/18(火)
修論(射影変換アルゴリズム)を書きました。
3種類のラベリング処理のプログラムを実験しましたが、どれも処理速度が遅く、実用的ではなかったので、新しい方法を考えたいと思います。
11/19(水)
修論(射影変換アルゴリズム)を書きました。
11/20(木)
修論(射影変換アルゴリズム)を書きました。
11/21(金)
プログラムを書きました。
11/22(土)
進捗はありません。
11/23(日)
進捗はありません。
文字特徴、環境用特徴を考慮した連結成分を検出するプログラムの作成
Order[]フィルタを用いた閾値処理プログラムの作成
11/17
ゼミで発表するスライドを作成しました。
11/18
連結成分を検出するプログラムの作成を行いました。
11/19
発表スライドの修正、ラベリング処理を行うプログラムの修正をしました。
先週は結局たくさんあるエラーを治すことができなかった。
今週もエラーを直すこと目標とする。
11/17
error LNK2028: 未解決のトークン (0A00000D) "*** が関数 "*** で参照されました。
error LNK2019: 未解決の外部シンボル "*** が関数 "*** で参照されました。
この二つのエラーに悩まされています。
11/18
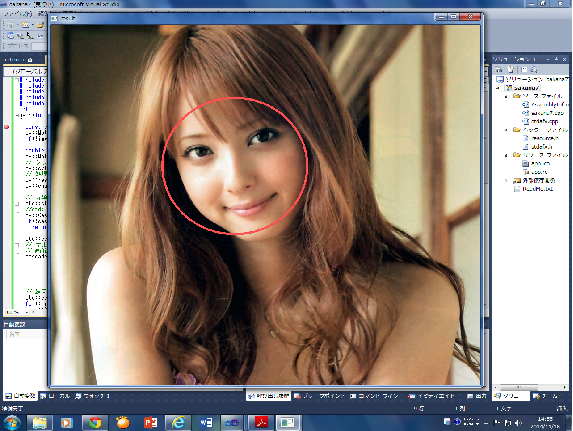
できました!!!
とりあえず顔検出ができるようになりました!
あとは魚検出のためのxmlファイルを使って実行したいと思います。
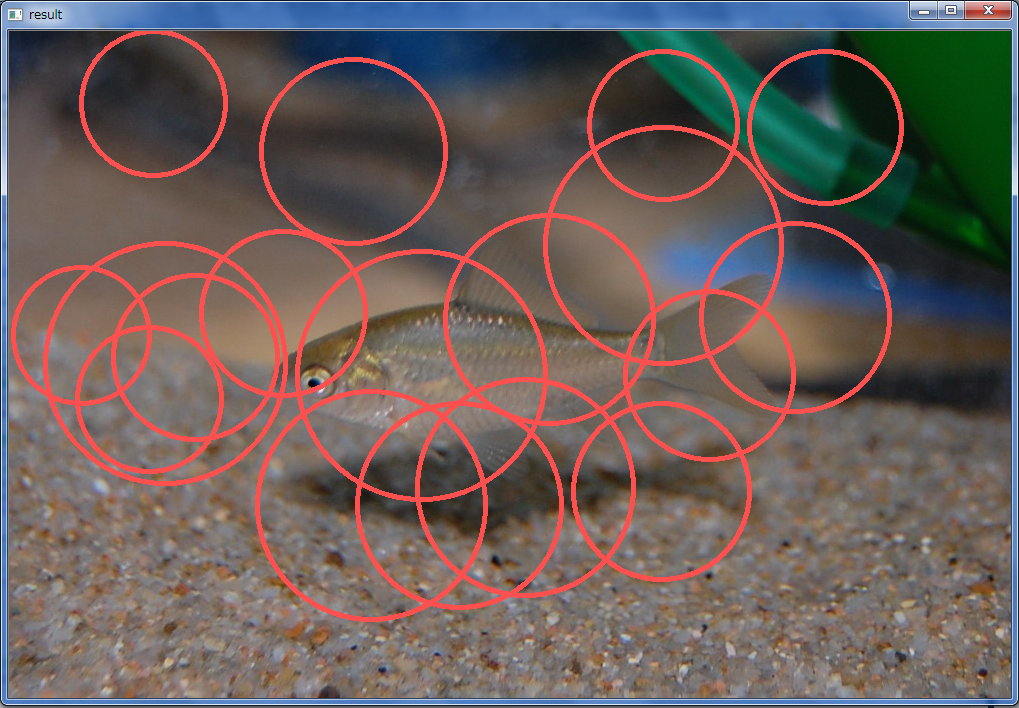
11/19
ポジティブ画像1000枚
ネガティブ画像1000枚を使って実行してみました。
結果はご覧のとおりダメダメでした。
精度を高めるために画像の枚数を増やしたいと思います。
11/17
2次選考 面接
11/18
2次選考 面接
11/19
2次選考 総合適性検査
課題
・VRAMの切り換え
→テストベンチの動作の検証
11/17
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
調停の部分の作成をすすめた。
テストベンチにて簡易的な動作の確認ができた。
11/18
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
進捗なし。
作成中のIFのポートの見直しをした。
11/19
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
階層設計の構築をはじめた。
階層設計について調べた。
11/20
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
階層設計の構築をすすめた。
11/21
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
進捗なし。
TeXをインストールした。
11/22
進捗なし。
11/23
進捗なし。
今週の課題
1、ATMアプリケーションの修正
(1)ATMの基本構成を考える
(2)ボタンの座標を計算し、計測する
(3)各画面のプログラムを修正する
2、電卓アプリケーションの開発
11/17
・先週からATMアプリケーションを修正していましたが
実際にタッチパネルで使うときはボタン配置をあまり変えない方が
いいと気づき、作り直しました。((1)終了)
・ATMの基本ページを作り、それを基にボタンの座標を計算し、計測しました。((2)終了)
次回から、各画面のプログラムを修正します。
11/18
メインプログラムを完成。
11/19
ゼミ発表資料を作成しました。
11/20
TAの点数を集計していたため、進捗はありません。
研究テーマ
「視覚障がい者向けタッチパネル操作支援システムにおける画像認識部の開発」
課題
1. 仮想システムで画面を遷移させて検証するための準備
2. AROB2015の論文作成
11/17
1. ページを作って遷移させるためにHTMLについて調べた。
2. 実験について作成中。
11/18
1. 進捗なし。
2. 全体の構成を修正中。
11/19
1. HTMLページの作成開始。
2. 全体の構成を修正中。試作機について。
11/20
1. 進捗なし。
2. 試作機について作成中。
[latexpage]
1.開平法プログラムの作成および高位合成
2.開平法のパイプライン化
以上の2つが今週の課題となります。
11/17
1.開平法プログラムの作成をしました。
2.進捗なし
11/18
1.開平法プログラムの作成をしました。(動作確認終了)
2.進捗なし
11/19
1.開平法のプログラムを高位合成しました。
パイプライン化した場合に回路規模が増大したため、その改善を試みます。
2.パイプライン化終了
11/20
1.進捗なし
2.進捗なし
11/21
1.進捗なし
2.進捗なし
11/22
1.進捗なし
2.進捗なし
11/23
1.進捗なし
2.進捗なし
11/18 15:00~ 飯塚
11/19 ~14:30 福工大非常勤
11/20 13:00~14:00 九工大保有特許ニーズ・シーズ研究会
11/21 13:00~17:50 PBL実験
11/25 13:00~ 産業応用工学会 理事会
11/26 13:00~16:10 PBL実験
11/27 12:30~15:00 推薦入試控室担当