10月の予定 (投稿の練習を兼ねて)
10/24(金) 午後:PBL実験
10/27(月)午前:山脇ゼミ
10/28(火) 午後:産業応用工学会 理事会
10/29(水)午前:福工大(非常勤)
10/30(木)終日:産学連携フェア(若松)
10/31(金)終日:産学連携フェア(若松)
10/23
曲面の計算を図書館の資料等を参考に行っていた
しかし、あまり思いつかなかったため、明日実際に曲面を作って実験を行う
10/24
曲面の反射板を作成中
一応、反射はうまくいったが、もう少し改良を加える
来週は水曜までに反射板2号を完成、ゼミで意見を聞く
課題
1,テストベンチの作成
2,論文の作成
11/17
1,拡大、縮小のプログラムに対するテストベンチができた
2,進歩なし
11/18
1,出力値をテキストに書き込むプログラムの作成
2,進歩なし
11/19
1,進歩なし
2,背景および目的まで書いた
11/20
1,進歩なし
2,研究内容まで書いた
11/21
1,進歩なし
2,日本語による論文を完成させた
今週の課題
1.PSoCを用いた回路の作成、動作検証
10/23
1.やってません
10/24
1.PSoCを用いた回路を作成
10/27
1.やってません
10/28
1 .PSoC部分のみで動作検証した
その結果、うまく動作しなかったので、PSoCプログラムから再確認を行う
10/29
1.PSoCプログラムを再確認し、修正した
書き込みもできたので、今後動作検証をする
選考中3社
1社目:1次面接を行い、結果連絡待ち
2社目:筆記試験を行い、結果連絡待ち
3社目:11月6日に2次選考
今週の課題
①フーリエ変換型のシミュレーションプログラムの作成(早急)
②自分のシミュレーションに近い論文の講読
10/22(水)
①プログラムの不具合を解消中
金曜までには完成させたい
②保留中
10/23(木)
①プログラムの不具合を解消中
②保留中
10/24(金)
①プログラム製作完了
次回よりシミュレーションと並行して文献調査
②保留中
10/25(土)
進捗なし
10/26(日)
進捗なし
10/27(月)
②以下の文献を講読開始
ホログラフィー/辻内順平著/裳華房/1997
フーリエ光学第3版/J.W.Goodman/森北出版/2012
Introduction To Fourier Optics/J.W.Goodman/1968
10/28(火)
②関連研究について調査中
課題
1.電源部の回路構成を組みなおし
2.電源回路のPSoCのプログラム見直しと書き込み
3.電源回路のACラインが実際に切れるか動作検証
10/22
電源部の回路を一度分解した
10/23
電源部の回路を組み替えた
10/24
電源部動作を確認
送信部を改良
10/27
赤外線受信モジュールの素子について調べた
10/28
1.電源部の回路構成を組みなおし
→完了
2.電源回路のPSoCのプログラム見直しと書き込み
→プログラム見直しは不要だった
3.電源回路のACラインが実際に切れるか動作検証
→電源回路のACラインが実際に切れた。波形をこれから記録していく
課題
1.光を集光する領域をどのくらい少ない解像度で再生できるかの検証
2.光渦をどの位置でも生成できるアルゴリズムの作成
課題1の検証が終わり次第、課題2に取り掛かります。
10/22
1.現在検証中
2.アルゴリズムの模索中
10/23
1. シミュレーションでの検証では少なくとも5×5[pixel]の白の領域なら光を集光できることがわかりました。
2.5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像が図1となります。
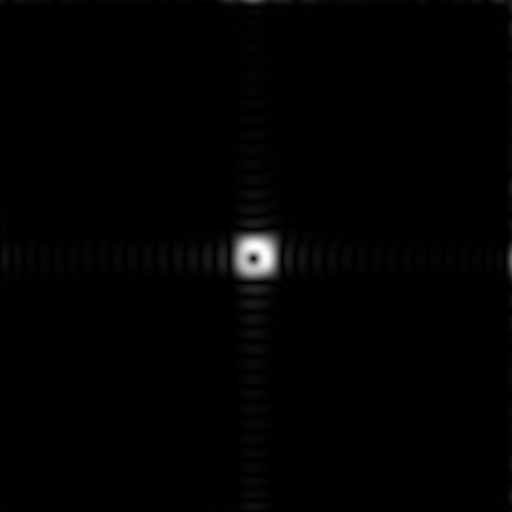 図1: 5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像
図1: 5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像
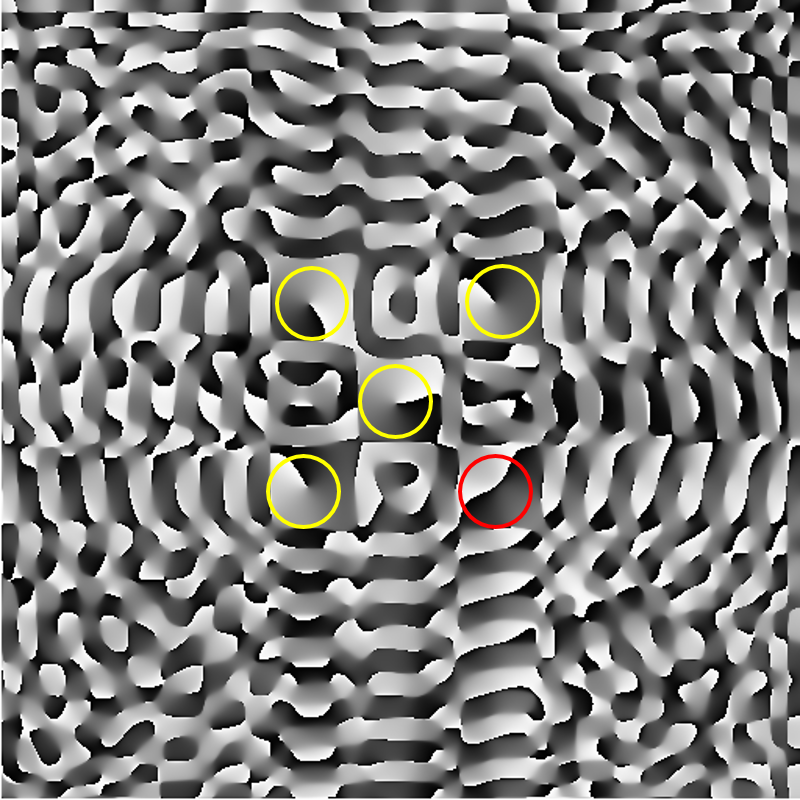
5つの白の領域にそれぞれスペックルを生成した像の振幅分布の画像が図2となります。図3は図2に対応する位相分布です。黄色の丸で囲っているところが光渦に対応している位相です。右下の赤丸で囲った位相をみると黒から白の螺旋状になっておらず、完全な光渦になっていません。今後どの位置でも光渦が生成できるようにアルゴリズムの改良を行います。
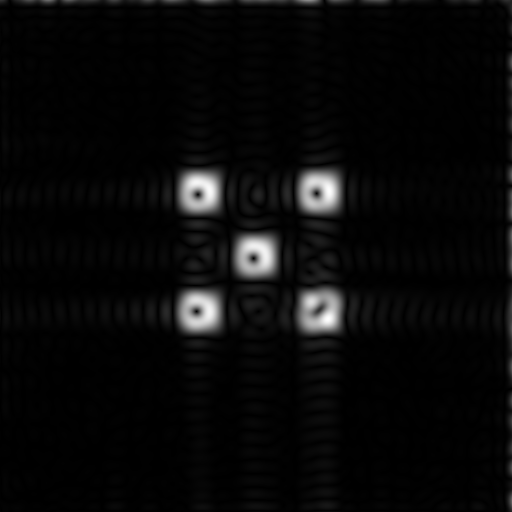 図2: 5つの白の領域にそれぞれスペックルを生成した像の振幅分布
図2: 5つの白の領域にそれぞれスペックルを生成した像の振幅分布
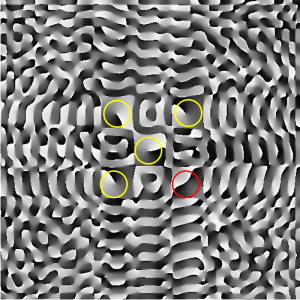
図3: 5つの白の領域にそれぞれスペックルを生成した像の位相分布
10/25
1.5×5[pixel]はスペックルを生成する際、バランスが悪いので6×6[pixel]の領域にしました。今後、集光する領域のピクセル数によるスペックル生成の影響を検証する予定です。
2.アルゴリズムの模索中
10/27
2.白の領域がある程度離れている場合に限り、どの場所でも光渦を生成できるようにアルゴリズムの改良を行いました。
位相分布の黄丸の位置の位相が黒から白に色が螺旋状に変化していることから黄丸の位置に光渦ができていることがわかる。
 振幅分布
振幅分布
Continue Reading ››
研究テーマ「二次元位置検出素子を用いた周波数変調光マーカによる三次元位置検出法」
課題
- 新手法で三次元位置検出ができそうか,今までの測定データで確認
- 新手法のプログラム作成
- 測定データの取得
10/20
1組の光源が
PSD受光面に対して平行に配置された場合,新手法で三次元位置検出が可能であることを確認しました。
10/21
新手法のプログラムを作成しました。
10/22
ゼミ発表のスライドを作成しました。
10/23
ゼミ発表のスライドを作成しました。
10/24
測定データの取得を開始しました。
テーマ
画像処理を用いた車両速度測定システムの開発
カメラの仕様の確認と、購入を行う
射影変換に変わる、線の長さを計算する手法を考える
10/20
1. カメラの公式ホームページの仕様で、シャッタースピードに関する項目があった。ただし、使い方を紹介しているサイトのcommand紹介のページで、シャッタースピードに関する項目がなかった。
2. カメラからの距離y[m]での、道路の線の幅x[m]としたとき、線形になると考えられる。その線形の式を、道路からの距離y[m]と、奥行きとして考えたpixelの長さの減少率での式に置き換えてみる。
10/21
1. 進まなかった。
2. 進まなかった。
10/22
1. 進まなかった
2. 進まなかった
10/23
1. 進まなかった
2. 進まなかった
10/24
1. 進まなかった
2. 進まなかった
10/25
1. カメラを調べた結果、最近のRaspberry Piのカメラモジュール用のライブラリには、シャッタースピードを変更できる関数があった。しかし、範囲が1/30[s]あたりと書いていたので購入してみて、調整を行う必要がある。
2. 全体ゼミの発表に備えて、新たに考えた手法をパワーポイントでまとめてみた。同時に、これまでの背景を見直して、自分の研究テーマの長所をまとめなおした。
10/26