10/18-10/21 Study on homework.
10/22-10/24 Arrange of Co-occurrence matrix data about fish.
10/25-10/26 Study on Japanese
研究テーマ
「視覚障がい者向けタッチパネル操作支援システムにおける画像認識部の開発」
課題
1. 複数バーコードの認識動画を撮影するための回路作成(音+ディスプレイ表示+7segLED表示)
2. 必要なボタン領域の検討
10/20
1.回路を作成したが、表示が上手くいかず、例えばRとGの場合だとそれぞれの表示が混ざったように光ってしまっている。原因を究明中。
2.進捗なし
10/21
1.簡単な7segLED表示回路をいくつか作って検証した結果、表示の切り替え速度が速すぎたみたいだった。
2.進捗なし
10/22
1.取得中のバーコードの7segLED表示が行えた。39パターン全て正しく表示されることを確認した。
2.進捗なし
10/23
1.完了しました。
2.ボタン領域を求めるためのデータを整理した。
10/24
1.完了しました。
2.指の速度とはみ出し距離のデータを元にボタン領域を検討し、八割方まとめた。
実行プログラムについて理解する。
10/14
実行プログラムについて調べる。
正解画像の作成
10/15
実行プログラムについて調べる。
正解画像の作成
10/16
実行プログラムについて調べる。
正解画像の作成
10/17
ネットが使えない
10/18
何もしてません
10/19
何もしてません
課題
1.PSoCを勉強し、PSoCを組み込んだ回路の作成
2.今後の研究について相談
10/16
1.やってません
2.先生と話し、大まかな流れを決めた
10/17
1.PSoCを調べながら、プログラム作成
10/18
1.やってません
10/19
1.やってません
10/20
1.PSoCの使い方を調べつつ、プログラム作成
10/21
1.PSoCプログラムを作成し、完成
10/22
1.PSoCプログラムの細かい設定修正 プログラム確認
展示会用のプログラムを作製すること
TOEICの勉強をすること
以上の2点が今週の課題です。
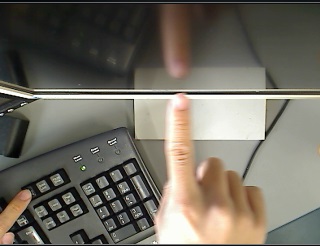
1.について、以下のようなアルゴリズムでの作製を検討しています。
- フレーム間差分で動いている物体の輪郭を取り出します。
- ラベリング処理とヒストグラムの解析を行い、指と反射像の座標を取り出します。
- CamShiftかテンプレートマッチングを用いて指先と反射像の追跡を行います。
10/15
1. パーティクルフィルタによる物体追跡を検討しました。パーティクルフィルタによる物体追跡のプログラムを作成しました。
2.模擬問題を解きました。
10/16
1. フレーム間差分のプログラムで輪郭を取り出すことが出来ました。
2.模擬問題のやり直しをしました。
10/17
1.ヒストグラムを表示させることが出来ました。
2.進捗はありません。
10/18
1.進捗はありません。
2.リスリング問題を解きました。
10/19
1.ラベリング処理のプログラムを書いています。
2.リスリング問題を解きました。
10/20
課題
①処理時間検証のためのテストベンチ作成
②プログラムの配列入力方法の変更
10/16
①テストベンチに入力するためのデータのテキストファイルに変更するプログラムの作成
②vivadoHLS上での検証
全体ゼミの発表準備
10/17
①テストベンチの作成中
②進捗なし
研究テーマ
「触覚を持った着せ替え可能なタッチパネルのシステム開発」
今週の課題
1、trackingプログラムの改善
2、GTKのマウス部分をタッチパネルの座標に変換する方法を考える
13日(月)
1、trackingプログラムがアプリケーションに依存していた。さらに状態遷移を作成することが難しくになっていたので改善を行いました。
当初、trackingプログラムを分離しようと試みました。しかし、trackingプログラムを使わずに各ノードを配列にして格納することによって状態遷移の設定が簡易的になると考え、試作
→以前のプログラムより、簡単にアプリケーションを開発できた。
14日(火)
芹川先生ゼミの資料作り
15日(水)
芹川先生ゼミの資料作り
2、GTKのシグナルについて勉強
16日(木)
2、GTKのマウスの座標検出プログラムについて勉強
電気回路(TA)の採点
17日(金)
電気回路(TA)の採点
シスエレ実験(TA)
{{unknown}}
- 円検出の誤検出の原因検討
- webカメラでの図形検出プログラムの構成
- 画像処理教本3章
10/15
ゼミ発表の準備をしていました
10/16
- 進捗はありません
- 進捗はありません
- 3-1を読みました
10/17
- 原因究明を行っています
- 動画像での円検出に成功しましたが、誤検出と処理速度に問題がありますので原因を探ります
- 進捗はありません
10/18
- 進捗はありません
- 進捗はありません
- 進捗はありません
10/19
- Hough変換プログラムのパラメータについて調べました
- 進捗はありません
- 進捗はありません
10/20
- 17日(金) 終日:高専懇談会(飯塚)
- 18日(土) 終日:大学説明会(福岡)
- 20日(月) 終日:シンポジウム(東京)
- 21日(火) 午前:会議、午後:副学長会議(福教大)
- 22日(水) 午前:講義、会議、午後:会議、教授会
- 23日(木) 午前:会議、午後:ゼミ、会議
- 24日(金) 午前:会議、午後:実験
- 25日(土) 午前:会議、夜:剣道部
- 26日(日) 午後:剣道部OB
- 27日(月) 午後:会議
- 28日(火) 午前:会議2件、昼休み:面談、午後:理事会
- 29日(水) 午前:講義、午後:会議
- 30日(木) 午後:会議、面談
- 31日(金) 午後:講演、夜:研究室飲み会
- 1日(土) 午後:懇親会