今週の課題
今週(10/7~10/13)は文献”
Exemplar-based image inpainting according to Criminisi et al.” を勉強して、既存のアルゴリズムを再現しました。今後は既存のアルゴリズムの欠点を改善し、新しいアイデアを考える。
具体的には、
- 新しい修復順を定義する
2.現在のアルゴリズムでは解決できない問題があるので、アルゴリズムの改良を行う。
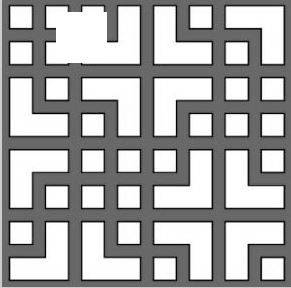
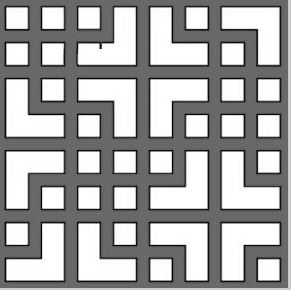
original image inpainting result
3.いまの方法はかなり時間かかりるので、計算時間の減るために、プログラムの改良を行う。
課題
- Raspberry Piを動かしてみる
- Raspberry Piで使えるカメラについて調べる
- 学会で指摘された、測定や、射影変換に誤差がないかという問題に対処する。
10/7
1. Raspberry Piに自宅の有線Lanからログインして起動を行ってみた。sshコマンドで遠隔ログインを行い、Macアドレスを取得できた。今後様々なプログラムを動かしてみる。
2. カメラはRaspberry PiのModel Bなら使えそうである。シャッタースピードを変更するためのコマンドも用意されているようなので、どのカメラを購入するか検討を行ってみる。
3. 対処方法として、道路の白線などの長さがはじめから分かっている物体と一緒に、車両を撮影してみる。光の線を含んだ範囲で射影変換を行い、その長さが分かっている物体と比較して精度を検証してみる。
10/8
1. Macアドレスの登録を行ってもらうようにお願いした。
2. まだカメラの選定が行えていない。
3. 進展はなかった。
10/9
1. まだ、研究室のパソコンでログインが行えていない。
2. カメラについては調べられなかった。
3. 陳さんとお話して、射影変換では、pixelの分解能が場所によって変わり、誤差が大きくなる可能性があることが分かった。実際に画像をリサイズして射影変換を行ってみた。
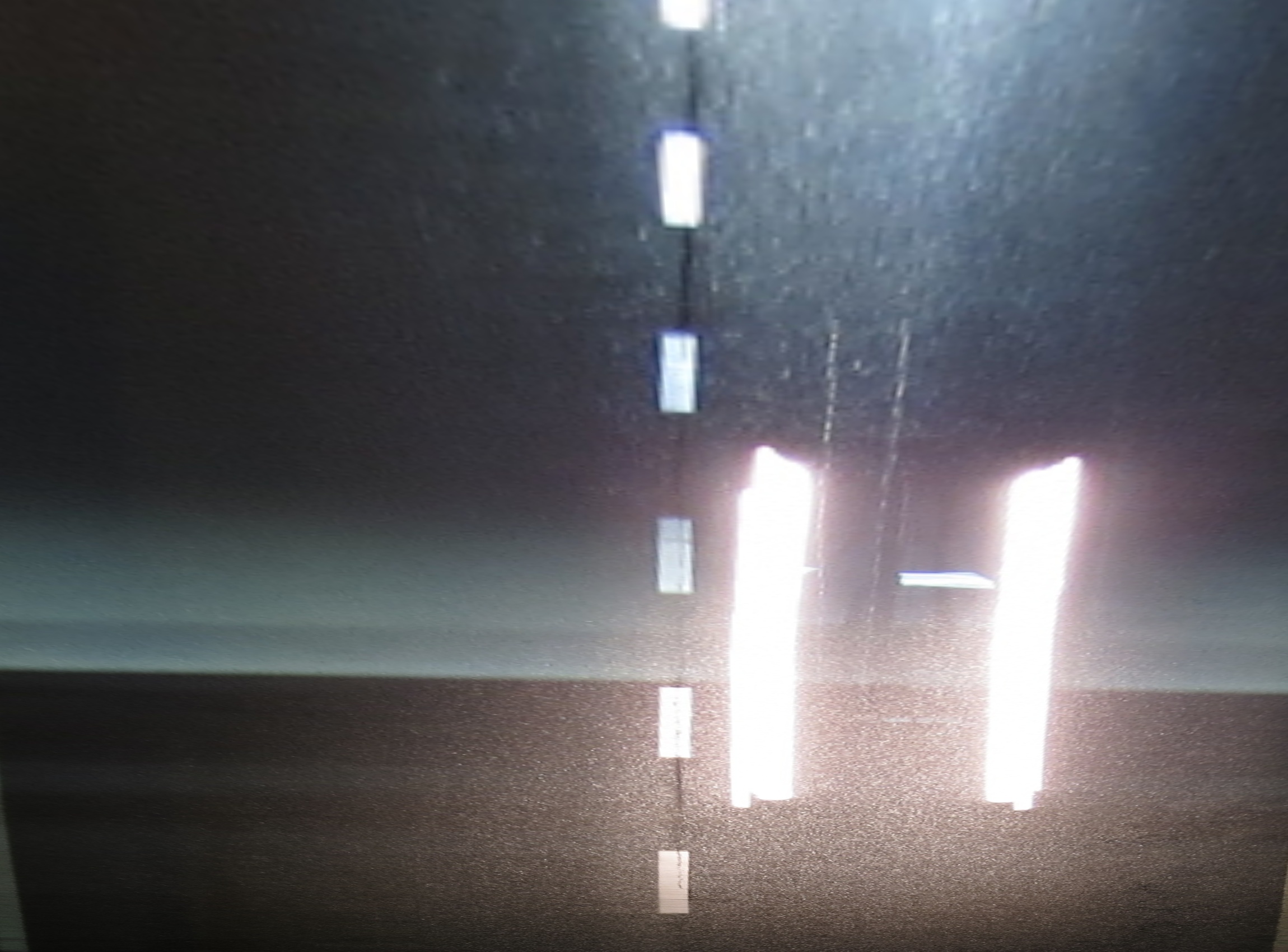
2300×1700
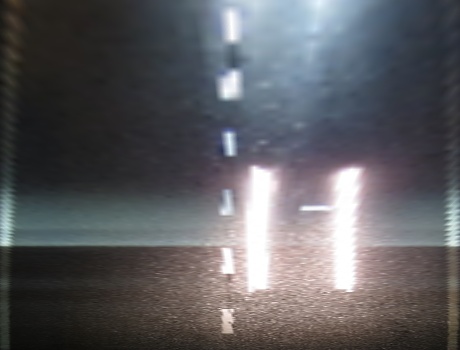
450×350

300×200
画素数が多い場合は、射影変換後、最も遠い場所でも道路の白線が鮮明である。しかし、画素数の少ない画像では、遠い場所の白線がかなり荒い。もし、光の線が遠い位置にあった場合、誤差の原因になったり光の線として抽出できないという問題になると考えられる。
画質をあげると、処理速度が落ちるので、どこまで上げるとどれだけ処理が落ちて、測定速度に影響するか調べる必要がある。
10/10
実家に帰省しています。
10/11
実家に帰省しています。
10/12
実家に帰省しています。
10/13
実家に帰省しています。
{{unknown}}
目標:
1:指先の形状検出に関する書籍を読む。
2:画像処理教本を読む。
3:TOEICの問題を3回解き直す。
10月7日
1:読めていません。
2:Chapter1を読みました。
3:Reading問題を解きました。間違えた問題の解説を読んで、解き直しました。
10月8日
1:読めていません。
2:Chapter2を読みました。
3:再度Reading問題を解きました。
10月9日
1:読めていません
2:
3:新しい問題を解きました。
10月10日
1:読めていません
2:読めていません
3:昨日の続きをしました。
10月11日
1:読めていません。パーティキュルフィルタによる追跡プログラムを作製しました。現在はプログラムを指先追跡用に改良しています。
2:読めていません
3:リスリング問題を解きました
10月12日
1:読めていません
2:読めていません
3:昨日の続きをしました。
『ステレオ画像からの3次元復元』
現在、3次元データを扱いやすく見やすい形で表示するため、OpenGLによる出力を試みています。
また、試したい復元方法も頭のなかにあるので、そのテストも行っていく予定です。
今週は以下の課題に取り組みます。」
1. OpenGLを使ったFormアプリケーションでの3次元表示方法の完成
2. 様々な復元方法のテスト及び考察
3. 基礎学習(文献を読む)
10/7
1. うまく行かずにエラーが出てしまった。理解もできていない状態でプログラムを転用したのが原因
2. 両画像の視差を一度に取得する方法を頭の中で考案中
3. 読めていない
10/8
1. OpenGLによる表示部分のプログラムが完成した 計測プログラムはまだ組み込めていない
2. SIFT(SURF)を使う、または応用する手法を視野に入れた
3. SIFT及びSURFについて調べた
10/14
1. OpenGLをつかい、3次元計測結果を表示することが可能となり、物体を回転させるプログラムが完成した
2. 考えていない
3. OpenGL関係の本を読み、ポインタ、構造体に関する情報を調べた
まとめ
Formアプリケーションを使った3次元表示プログラムが一旦完成したが、応答速度に問題があり、改善の余地はまだまだありそう。プログラムを洗練しながら、新しい手法を構築していくことが今後の目標です。
テーマ:オフサイドの自動検出
今週の課題:移動物体の追跡をピッチ上の選手に適応させ、問題が発生しだい修正を行う
10/9
テンプレートマッチングとmeanshiftを用いた選手の追跡を行いました。結果はmeanshift用いた方法はプログラムが悪いのか全く追跡できず、テンプレートマッチングを用いた方法はある程度追跡できましたが、選手同士の距離が近いと誤検出する問題が発生しました。その例の動画を下に添付します。
10/10
追跡におけるオクル―ジョン(隠れ)の問題についても参考資料を検索し、検討しました。
- ハフ変換での円検出のプログラムの作成(継続)
- フレーム間差分のプログラムの考案
- 画像処理教本を読む
10/8
- 円検出のプログラムを作成しましたが、フォルダから画像を読み取ることができてないようだったので原因の解明を行っていきます。
- webカメラから動画像をキャプチャできました。次はフレーム間差分処理を行うプログラムを構築しようと思います。
10/9
- 円の検出が出来ました。ですがまだ正しく検出できてない部分があるので原因を探しつつ改善していこうと思います。
10/10
10/11
10/12
10/13
- 英文購読を進めました。
- 次のゼミのスライド作成を行いました。
1.画像処理教本を読む
2.kinectに関する本(kinectセンサー)を読み、kinectを動かす。
10/7
kinectセンサーの1章を読み、プログラムを組みました。
Python27をインストールしてサンプルプログラムを動かしました。
10/8
kinectセンサーの2章を読み、プログラムを組んだが動きませんでした。
10/9
KinectのRGBセンサを読み取るプログラム(Win32)を動かしました。
10/10
KinectのRGBセンサを読み取るプログラム(フォームアプリケーション)を組んだが、動きませんでした。
10/11
KinectのRGBセンサを読み取るプログラム(フォームアプリケーション)を組んだが、動きませんでした。
10/12
深海について調べていました。
10/13
英文購読をしていました。
今週の課題
1.Illmination-Aware Age progression (既存の研究の論文) を読み、そこで使われている手法について学ぶ。
2.コレクションフロー法、オプティカルフロー法、オプティカル フロー推定法について調べる。
3.画像処理教本読む。
10/7
1.読みました。
2.それぞれの手法がこの研究でどのような形で使われているか少しわかってきました。
3.読んでません。
10/8
1.この既存の研究がどのような流れで一枚の画像からエイジングの
変化を与えているかおおまかな流れを掴みました。
2.おおまかな流れがわかったのでどの行程でどの手法が使われているかわかりました。
3.読んでません。
10/9
1.論文読み進めました
3.読んでません
英文購読の課題をしました。
プレゼン資料を作成途中です。
10/10
1.読み進めました
3.読んでません
英文購読の課題をしました。
プレゼン資料を作成途中です。
10/11
帰省しました。
英文購読の課題をしました。
10/12
帰省しました。
英文購読の課題をしました。
プレゼン資料を作成途中です。
10/13
英文購読の課題をしました。
プレゼン資料を作成途中です。
9/30~10/6
ワシントン大学の論文 Illumination-Aware Age Progression を読み進めました。それと平行して画像処理教本1-2章えお読み進めました。
この既存の研究では コレクションフロー法、オプティカルフロー法、
オプティカルフロー推定法などが使われていることがわかりましたので
この手法について調べていこうと思います。
Stay Hungry, Stay Foolish!
