内々定懇親会で東京にいるので、ゼミは欠席します。
来週から研究進めてきます

内々定懇親会で東京にいるので、ゼミは欠席します。
来週から研究進めてきます
私用で鹿児島にいるので今日のゼミは欠席します。
今週はずっとバイトしてたので進捗は全然無いです。
RAFTに、光学フローにおける全体画素の動きを数値化する機能を加えた。結果は1フレームあたりの動きが小さすぎて、毎フレームごとに0.1以下の数値が出力された。これは、何も動きがない状態の誤差と同じ程度の数値だったため改善が必要である。5フレームあたりの動きの差分を取ることで改善しようと考えている。
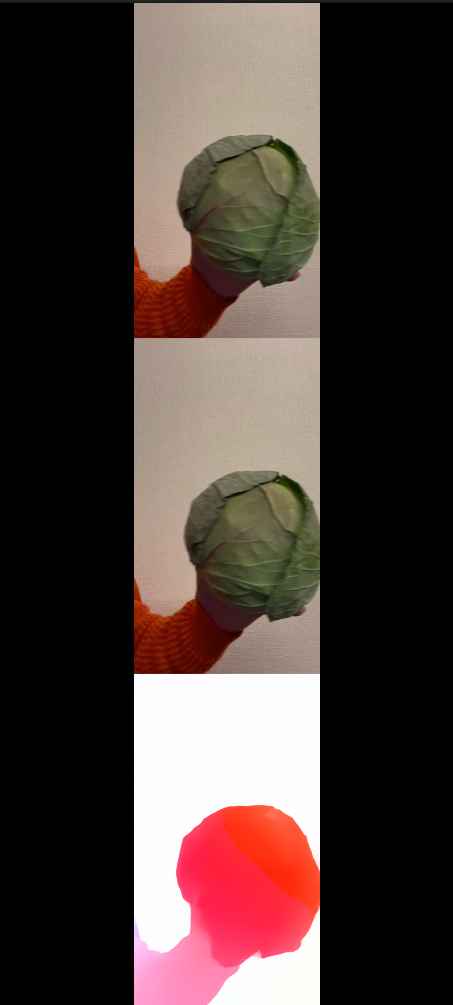
RAFTとAILIA SDKを組み合わせたコードが公開されていたのでそのコードを実行して検証を行った。動画は何故か貼れなかったので画像を貼っておきます。動き自体は追跡できると感じたので、次は光学フローの向きを計算して数値として表示したいと考えている。
RAFTのコード解析を行った。今回実行したファイルはモデルの評価用ファイルだったため、実際のデータセット(sintel,FlyingChairs)を用いて事前学習済みモデルの評価を行った。出力はEPE(Endpoint Error)および1px, 3px, 5pxなどのピクセル誤差の大きさで、学習済みモデルの精度を評価するものであった。
また、RAFTでは光学フローの向きを確認する部分がなく、動画読み込みで検証が出来ない状態だったため、改善する必要がある。
電子回路の採点終わりました。
今日は私用があってでゼミを欠席します。
今週は用事が多く進捗が出せなかったため、来週は研究を進めていこうと思う。
今日は内々定書通知式があるのでゼミを欠席します。
YOLOv9で、元々使っていたデータセットを学習させました。
RAFTのデモを行ったが、思っていたような結果が出力されなかったので、一度出力ファイルのコード解析をしようと思う。
学部研究で使っていたデータセットと重みファイルを保存していたと思っていたら、保存出来ていなかったので少し焦ってます。Gitに保存したような気がしますが、現在確認できない状態です。もし、Gitにもなかったら動画読み込みができるアノテーションツールを使おうと思う。