
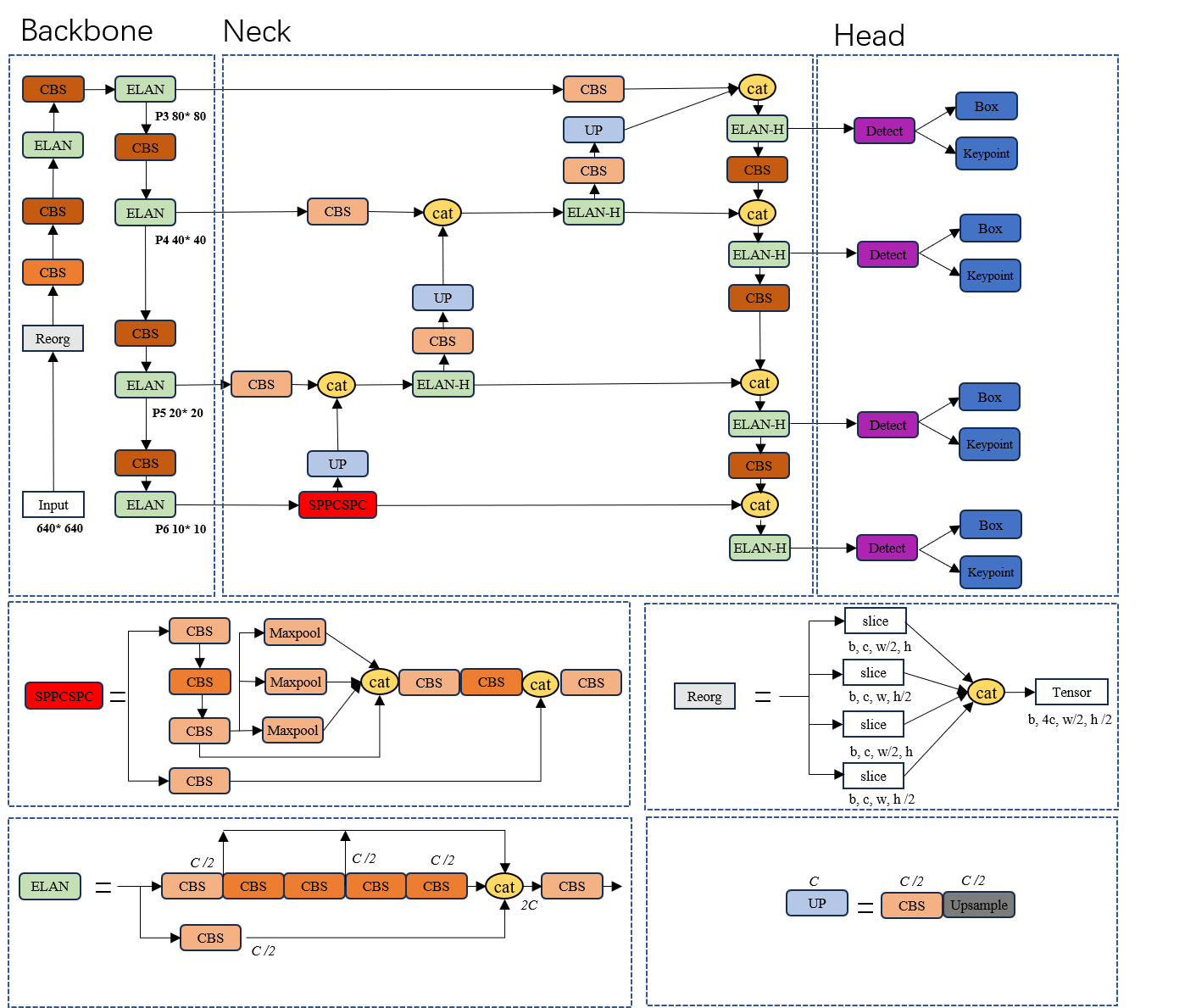
- Modify YOLOv7 structure for KITTI datasets.
- The code of YOLOv7 is studied, and the loder and processing of stereo-data are introduced into the model structure.
GaoYuliang のすべての投稿
Thesis Draft_Research Background_Introduction(GAO)
My research aims to study the application of deep learning technology in corn cultivation to meet various needs at different stages of corn planting. In the stage of corn breeding, it is crucial to assess the growth status of corn, with phenotype extraction algorithms being key technologies. During the development and maturity phases … Continue Reading ››
週報(GAO)
- Article has been published( https://doi.org/10.3390/agriculture14060907)
- Describe the experience briefly:
- The article should make it clear what purpose is to be accomplished and what results are to be achieved. What kind of methods were used? I think this is most improtant.
週報(GAO)
- Paper access: ''Extraction of Corn Plant Phenotypic Parameters with Keypoint Detection and Stereo Images''(https://doi.org/10.3390/agronomy14061110)
- Making research on 6D Pose and choosing a suitable frame to reproduce.
週報(GAO)
1.learn the framework of yolo-v8
2. learn the seam attention mechanism(https://arxiv.org/abs/2208.02019)
3. Try to come up with a better data fusion framework
4.Evaluation mechanisms are learning
週報(GAO)
- Finish paper "
Corn plant phenotypic parameters extraction algorithm based on keypoint detection and stereo images" - Change my paper "FCOS_Stereo"
週報(GAO)
{{unknown}}
週報(GAO)
The first draft of the paper has been completed, and it is expected to be completed in one week
週報(GAO)
- detect key points based on yolo-pose
- use mpdiou and focal mechanism to improve accuracy
- Use GSCONV and pruning framework to reduce the parameters of the model
週報(GAO)
I am writing my paper and expect to finish the first draft within a week.