今読んでいる論文は以下の3つです。
【ワシントン大学】論文
exploring photobios
コレクションフロー法
全体ゼミで発表したように、コレクションフロー法に焦点をあて、研究
していくつもりです。
10/21
コレクションフロー法の論文を読み進めました
10/22
コレクションフロー法の論文を読み進めました。
論文中の写像の式と思われる
(I→I')は何を表しているのかわかりません。
ちなみにIは入力画像、I'は二枚の入力画像の中性的になるように
変化を施した画像です。
わかる方がいましたら教えていただきたいです。
10/23
コレクションフロー法の論文を読みました。
10/24
コレクションフロー法の論文を読みました。
10/25
帰省してました
10/26
帰省してました
10/14~10/16
プレゼンの資料を作成していました。
10/17
画像処理教本をよみました。
10/18~19
バイトしていました。
10/20
コレクションフロー法を調べました。
コレクションフロー法
exploring photobios
【ワシントン大学】論文
これらが今読んでいる論文です。
- 画像処理教本4章を読む。
- ゼミ用にスライドを作る。
以上の2点が今週の課題です。
張先生へのリンク
10/20
1.進捗はありません。
2.張研ゼミで指摘して頂いた点を修正しました。
10/21
1.4章を読みました。
2.スライドの細かな点を修正しました。
10/22
1.進捗はありません。
2.スライドを一通り作り終えました。>>
スライドのリンク
10/23
1.進捗はありません。
2.ゼミで質問された点をまとめました。>>
リンク
10/24
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
10/25
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
10/26
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
今週の課題
1.先週出た問題を解決する
2.修復順のアルゴリズムを考える
10/15
計算時間が長すぎる原因を理解した,その原因はパッチの大きさとexampleウィンドウの大きさだった。そこで、違う大きさのパッチで実験し、現時点で最適なサイズを選んだ。修復の結果と循環の回数を考えて、パッチのサイズは破壊された部分の40分の1を設定します。
10/16
不自然な部分の修復の原因を理解して、一つ一つパッチで进行实验実験を行う。原因は理想的なexampleと、選んだexampleの既知の部分が非常に似ていた。exampleウィンドウを大きくなると結果がよくなる。
10/17
修復順部分のアルゴリズムを作成中
展示会用のプログラムを作製すること
TOEICの勉強をすること
以上の2点が今週の課題です。
1.について、以下のようなアルゴリズムでの作製を検討しています。
- フレーム間差分で動いている物体の輪郭を取り出します。
- ラベリング処理とヒストグラムの解析を行い、指と反射像の座標を取り出します。
- CamShiftかテンプレートマッチングを用いて指先と反射像の追跡を行います。
10/15
1. パーティクルフィルタによる物体追跡を検討しました。パーティクルフィルタによる物体追跡のプログラムを作成しました。
2.模擬問題を解きました。
10/16
1. フレーム間差分のプログラムで輪郭を取り出すことが出来ました。
2.模擬問題のやり直しをしました。
10/17
1.ヒストグラムを表示させることが出来ました。
2.進捗はありません。
10/18
1.進捗はありません。
2.リスリング問題を解きました。
10/19
1.ラベリング処理のプログラムを書いています。
2.リスリング問題を解きました。
10/20
テーマ:オフサイドの自動検出
今週の課題
1、足の部分を特定する方法の検討
2、選手追跡の改善
以上の二つを主に今週の課題として行っていきたいと思います
10/17
授業のレポートを中心にやっておりました
進捗はありません
- 作成したプログラムのバグを取り除くこと。
- 画像処理教本3章を読むこと。
- スライドを見やすく書き直すこと。
以上の三点が今週の課題です。
1.について、以下に示す2つの論文をベースにアルゴリズムを構築しています。
10/15
1.作業を進めています。
2.3-3-2まで読みました。光学モデルの内容で難しいです。
3.進捗はありません。
10/16
1.バグの範囲を特定しつつあるのですが、いまだに修正できず、苦戦しています。
2.3-4-2まで読みました。
3.進捗はありません。
10/17
1.プログラムの修正が完了しました。提案手法がデータベース作成部とマーカー検出部に分かれており、現在は、データベース作成部の処理を行っています。
2.進捗はありません。
3.進捗はありません。
10/18
1.昨日に引き続き処理を行っています。
2.3章を読みました。
3.ゼミ用にスライドを修正しています。
10/19
1.昨日に引き続き処理を行っています。
2.進捗はありません。
3.ゼミ用にスライドを修正しています。
課題
- Raspberry Piで、プログラムを動かす
- カメラを購入し、Raspberry Piで動かす
- 射影変換で、車両の高さが及ぼす誤差値を計算する
10/14
1. Raspberry Piはまだ動かしていない。
2. カメラの選定中。
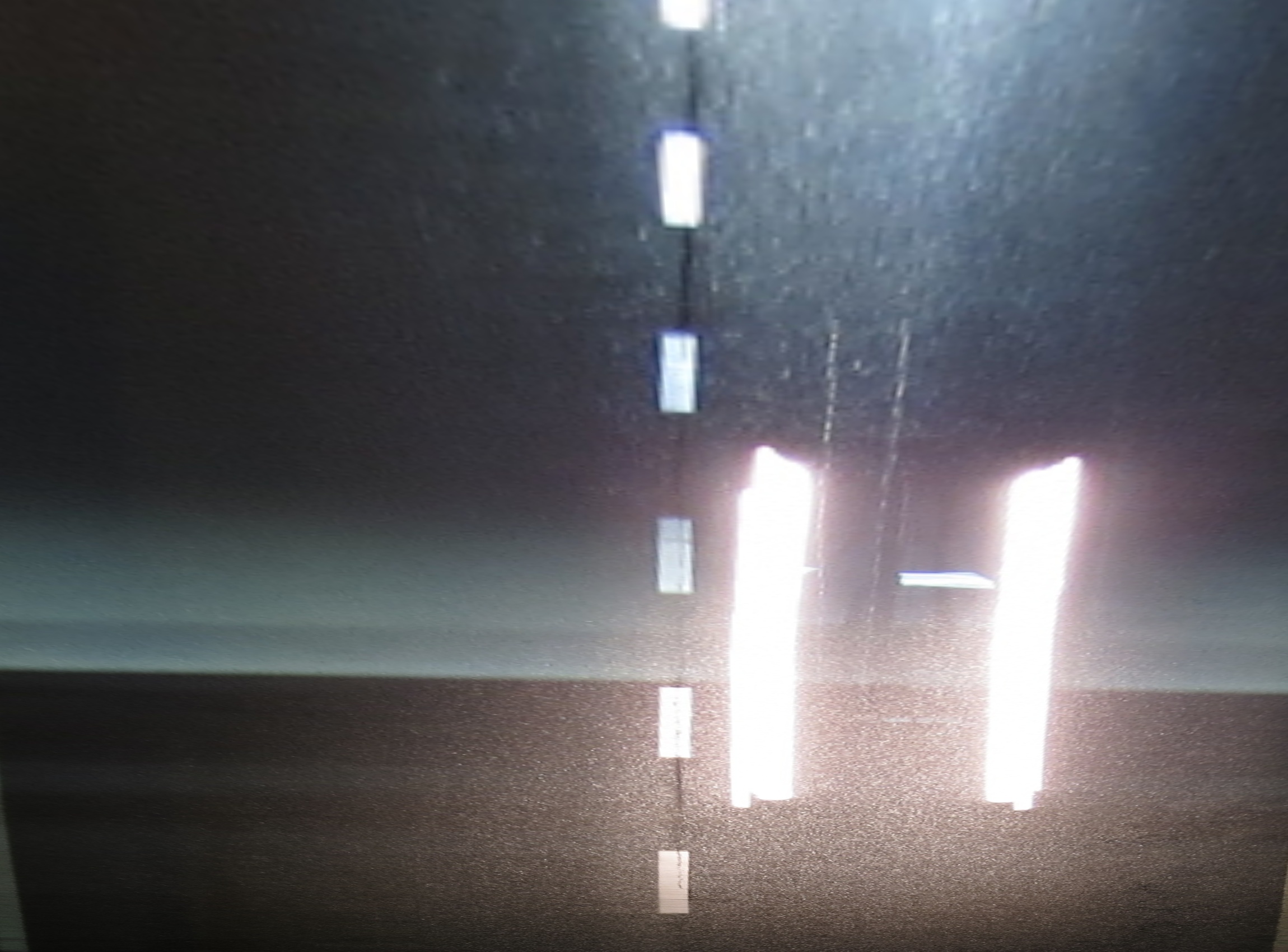
3. 車両のヘッドライトの高さを0.5[m]と仮定して、シミュレーションを行ってみた。今の方法では、ヘッドライトが道路と同じ高さであると仮定して射影変換を行っている。そのため、射影変換から計算する光の線に、若干の誤差が生じている。
今回撮影した画像の環境を仮定して計算したところ、約0.88[m]、時速に置き換えると約時速3.2[km/h]の誤差が出ていた。
10/15
1. 研究室のサーバでは、Raspberry PiにIPアドレスでログインすることが出来なかった。そこで、PCとRaspberry Piを直接Lanケーブルでつなぎ、共有ネットワークにすることで、Raspberry Piにsshでログインできた。
2. Raspberry Pi専用のカメラがあるので、そのカメラがシャッタースピードなどを設定できるか調査中
3. 誤差について検証中
10/16
1. ネットがつながらなかったので、Raspberry Piを使用していない。
2. 調査中
3. 射影変換では、誤差が出ていることが判明。誤差率について計算中であるが、ほかの方法も検討中。
10/17
授業レポートを行った。
1. 使用していない
2. 調査が出来なかった
3. 道路自体を抽出出来れば、その道路の幅が短くなっていく比率が計算できる。その比率を、画像の縦のpixelの変化率に応用で出来れば、ある地点の光の長さが計算できる可能性がある。
10/18
10/19
10/20
課題
- Raspberry Piを動かしてみる
- Raspberry Piで使えるカメラについて調べる
- 学会で指摘された、測定や、射影変換に誤差がないかという問題に対処する。
10/7
1. Raspberry Piに自宅の有線Lanからログインして起動を行ってみた。sshコマンドで遠隔ログインを行い、Macアドレスを取得できた。今後様々なプログラムを動かしてみる。
2. カメラはRaspberry PiのModel Bなら使えそうである。シャッタースピードを変更するためのコマンドも用意されているようなので、どのカメラを購入するか検討を行ってみる。
3. 対処方法として、道路の白線などの長さがはじめから分かっている物体と一緒に、車両を撮影してみる。光の線を含んだ範囲で射影変換を行い、その長さが分かっている物体と比較して精度を検証してみる。
10/8
1. Macアドレスの登録を行ってもらうようにお願いした。
2. まだカメラの選定が行えていない。
3. 進展はなかった。
10/9
1. まだ、研究室のパソコンでログインが行えていない。
2. カメラについては調べられなかった。
3. 陳さんとお話して、射影変換では、pixelの分解能が場所によって変わり、誤差が大きくなる可能性があることが分かった。実際に画像をリサイズして射影変換を行ってみた。
2300×1700
450×350

300×200
画素数が多い場合は、射影変換後、最も遠い場所でも道路の白線が鮮明である。しかし、画素数の少ない画像では、遠い場所の白線がかなり荒い。もし、光の線が遠い位置にあった場合、誤差の原因になったり光の線として抽出できないという問題になると考えられる。
画質をあげると、処理速度が落ちるので、どこまで上げるとどれだけ処理が落ちて、測定速度に影響するか調べる必要がある。
10/10
実家に帰省しています。
10/11
実家に帰省しています。
10/12
実家に帰省しています。
10/13
実家に帰省しています。
Stay Hungry, Stay Foolish!