課題
フーリエ変換型キノフォームの学習
10/27
- 先行研究のプログラムの解析および理解できていない点のチェックを行った。
- 計算機ホログラムに関する原理を先輩方の論文から学習した。
10/28
- プログラムにおいて不明な点を古賀さんに質問し、現段階で理解している点の確認も行った。
10/29
- ホログラム再生に関してのプログラムの学習を行っている。
後のプログラムの作成をスムーズにするため、C言語についての復習を今週の課題として追加する。
(今週の課題)
- 10/23に全体ゼミで発表したスライド(一部は修論スライド)の修正と追加
- シミュレーションにおいて、入力にガウス分布を用いたときの結果(再生像)を出す
(進捗状況)
10/27(月)
今日は企業との共同研究について、芹川先生、田中くん、大西くんと、今後の方針や必要な機能について話し合った。今回、色々な案が出たため近いうちにまとめて11/14に再度話し合いをして詳しいことなどを決めていく。
10/28(火)
- 背景と原理についてウェブにて模索中
- 進捗なし
10/29(水)
- 背景と原理についてウェブにて模索中
- 進捗なし
10/30(木)
体調不良のため早退
10/31(金)
発表スライドの修正
課題
1.光を集光する領域をどのくらい少ない解像度で再生できるかの検証
2.光渦をどの位置でも生成できるアルゴリズムの作成
課題1の検証が終わり次第、課題2に取り掛かります。
10/22
1.現在検証中
2.アルゴリズムの模索中
10/23
1. シミュレーションでの検証では少なくとも5×5[pixel]の白の領域なら光を集光できることがわかりました。
2.5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像が図1となります。
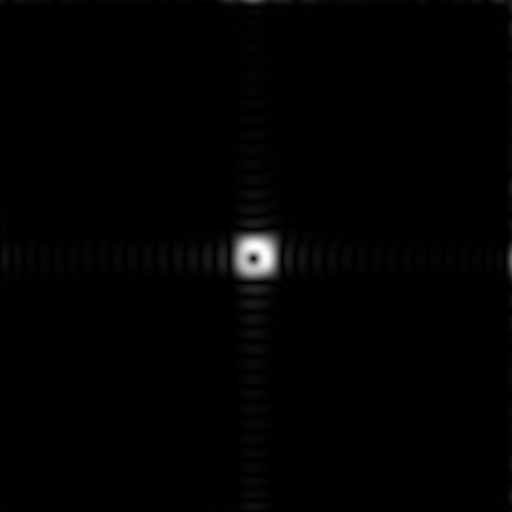 図1: 5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像
図1: 5×5[pixel]の白の領域にスペックル(光渦)を1個生成した画像
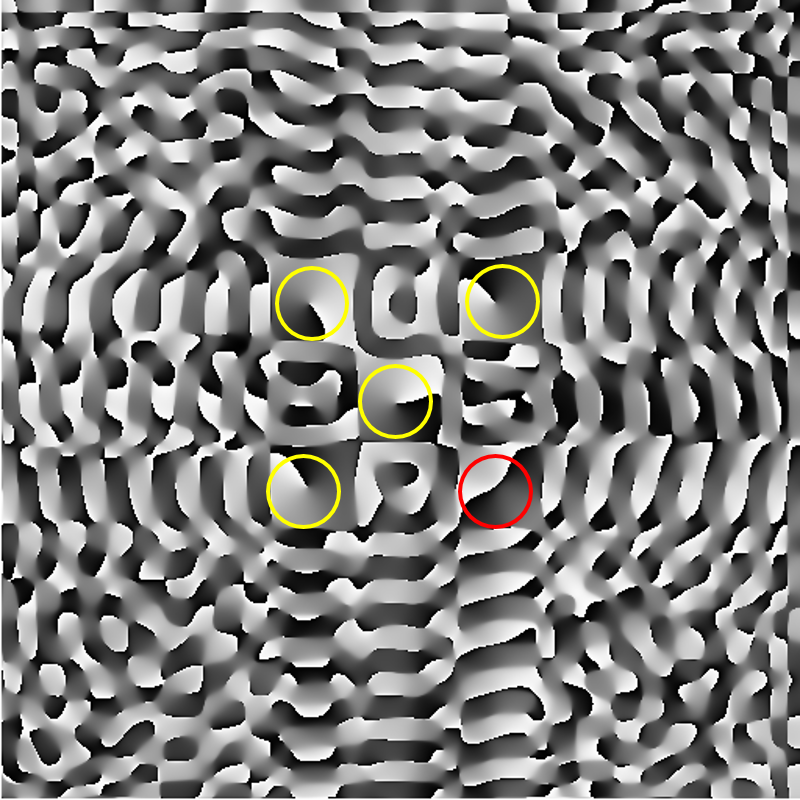
5つの白の領域にそれぞれスペックルを生成した像の振幅分布の画像が図2となります。図3は図2に対応する位相分布です。黄色の丸で囲っているところが光渦に対応している位相です。右下の赤丸で囲った位相をみると黒から白の螺旋状になっておらず、完全な光渦になっていません。今後どの位置でも光渦が生成できるようにアルゴリズムの改良を行います。
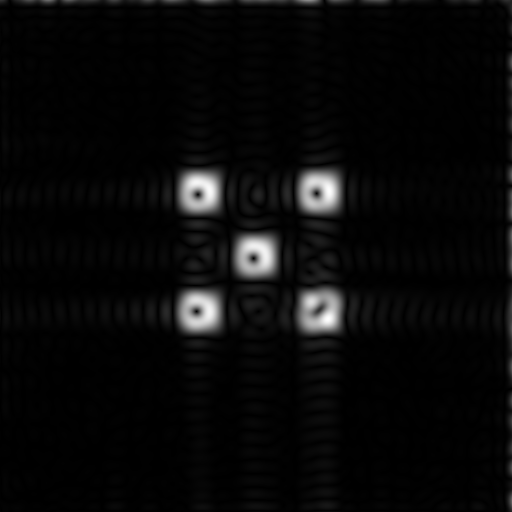 図2: 5つの白の領域にそれぞれスペックルを生成した像の振幅分布
図2: 5つの白の領域にそれぞれスペックルを生成した像の振幅分布
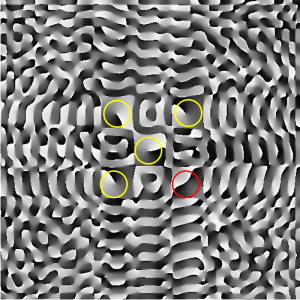
図3: 5つの白の領域にそれぞれスペックルを生成した像の位相分布
10/25
1.5×5[pixel]はスペックルを生成する際、バランスが悪いので6×6[pixel]の領域にしました。今後、集光する領域のピクセル数によるスペックル生成の影響を検証する予定です。
2.アルゴリズムの模索中
10/27
2.白の領域がある程度離れている場合に限り、どの場所でも光渦を生成できるようにアルゴリズムの改良を行いました。
位相分布の黄丸の位置の位相が黒から白に色が螺旋状に変化していることから黄丸の位置に光渦ができていることがわかる。
 振幅分布
振幅分布
Continue Reading ››
研究目標「レーザダイオードアレイ光の波面における位相分布の推定」
研究進捗
- 10月上旬
- 英文講読の仕上げ
- 全体ゼミで発表するスライドの編集
- 二強度位相回復プログラムの作成
10/17
- 作成したプログラムの内容を楊先生へ説明
- プログラムの指摘を受けた部分の訂正
今週の予定
- 位相回復の精度を評価できるようにする。
- 各パラメータの変更に対するデータを集める。
- 関連研究の調査を行う。
10/20
- 楊先生に提案して頂いた回復の精度を求める方法を用いるようにプログラムの書き換えを行った。
- 1.のプログラム上にて、観測される強度分布を変更しながらデータを集めた。 file:回復誤差データ
- 特になし。
10/21
体調不良のため欠席
10/22
- 変更なし。
- 回復誤差データをより多く集めた。10/20のデータように最大誤差の大きな部分がみられた。そのため、初期条件において与える位相を変化させてみた。
- 特になし。
10/23
光学的問題(光源の可干渉性の不足)により研究テーマの変更
10/24
キノフォームのプログラムの学習
{{unknown}}
キノフォームとは位相のみを記録する位相型計算機ホログラムの一種です。
Stay Hungry, Stay Foolish!