今までにしてきたこと
・ボードの移行(NEXYS 3 → ZYBO)(両方用いる)
・カメラモジュール⇔FPGAボードのキットの開発
・シリアル通信モジュール⇔FPGAボードのキットの開発
課題
・ディスプレイ表示の拡大
・VRAMの追加
10/20
・ディスプレイ表示の拡大(ISE)(FPGAボード:NEXYS 3)
128*64が2つ並んでいる状態であったが、128*128の表示に修正できた。
10/21
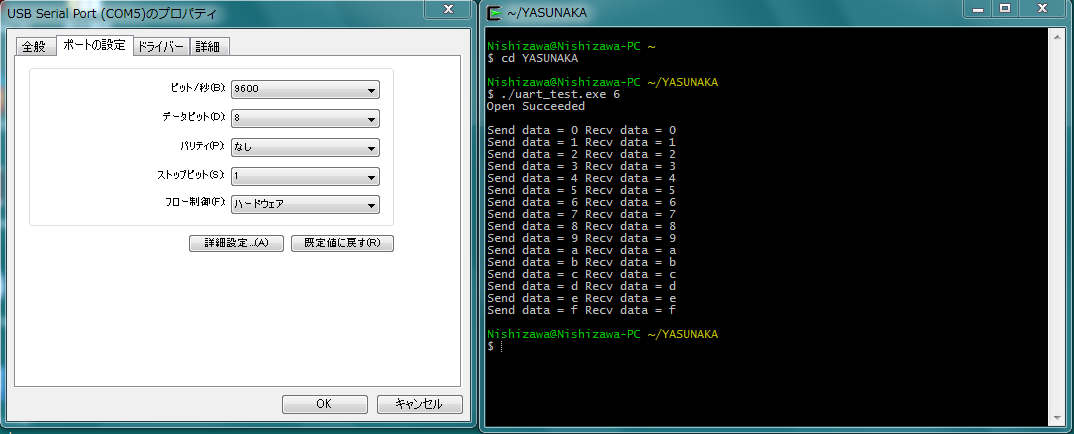
・シリアル通信モジュール
動作の確認ができた。(Vivado)(FPGAボード:ZYBO)
10/22
・カメラモジュール
壊れた。
・VRAMの追加(ISE)(FPGAボード:NEXYS 3)
VRAMを増やした。シミュレーションできるように考える。
10/23
・汎用開発環境プロジェクトフォルダ(Vivado)(FPGAボード:ZYBO)
先生に作成していただいたプロジェクトをプログラムファイルにして
ZYBOに書き込みシリアル通信を試みたが、通信が止まってしまったため原因を考える。
・VRAMの追加
先生からいただいた資料を元に動作を考える。
10/24
・汎用開発環境(Vivado)(FPGAボード:ZYBO)
シリアル通信ができた。
・シリアル通信モジュールのキット
グランドの配線を追加した。
電源をUSB経由限定にした。
・カメラモジュール
注文の準備をした。
- 動画像での図形検出の処理時間を短縮する
- 画像教本3章
10/20
- Hough変換プログラムの高速化において投票法というものがあると張先生からお聞きしたので現在投票法について調べを行っています。
- 進捗はありません
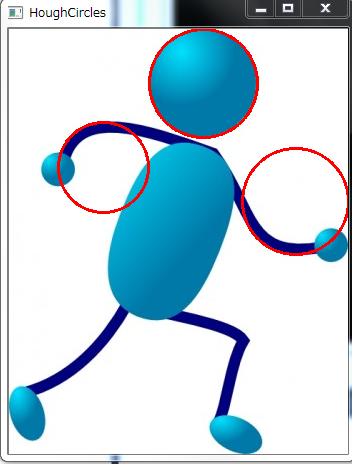
先週、円検出プログラムで円を検出した画像を貼っておきます。
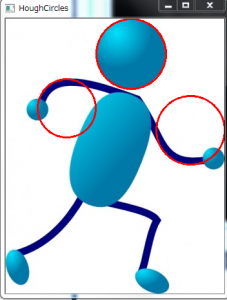
現在、円でない部分を円と認識している、円の部分が検出されていないといった所がみられるので原因を調べていきます。
10/21
- Hough変換のパラメータを変化させて検証結果を収集しています
- 進捗はありません
10/22
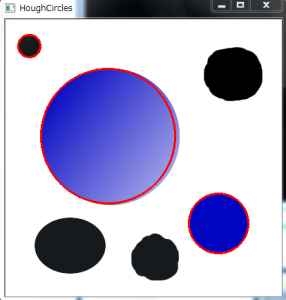
- Hough変換プログラムのパラメータの調整をしました。円の誤検出はあるものの、リアルタイムでの処理は可能なレベルまで処理速度を上げることが出来ました。
- 3-1を読みました
10/23
- 投票数の調整を行いました。円の検出の精度を上げることができましたが、円のエッジ検出だけでは限界がありそうなので改良をしていきます。
- 進捗はありません。
10/24
- 現段階のプログラムでバレーボールで円の検出を行った動画を取りましたがアップでエラーが発生してメディアに追加できないので後日上げます
- 進捗はありません
10/25
- 進捗はありません
- 進捗はありません
10/26
- 進捗はありません
- 進捗はありません
来週から来月のTOEICに向けて対策を開始します
今読んでいる論文は以下の3つです。
【ワシントン大学】論文
exploring photobios
コレクションフロー法
全体ゼミで発表したように、コレクションフロー法に焦点をあて、研究
していくつもりです。
10/21
コレクションフロー法の論文を読み進めました
10/22
コレクションフロー法の論文を読み進めました。
論文中の写像の式と思われる
(I→I')は何を表しているのかわかりません。
ちなみにIは入力画像、I'は二枚の入力画像の中性的になるように
変化を施した画像です。
わかる方がいましたら教えていただきたいです。
10/23
コレクションフロー法の論文を読みました。
10/24
コレクションフロー法の論文を読みました。
10/25
帰省してました
10/26
帰省してました
10/14~10/16
プレゼンの資料を作成していました。
10/17
画像処理教本をよみました。
10/18~19
バイトしていました。
10/20
コレクションフロー法を調べました。
コレクションフロー法
exploring photobios
【ワシントン大学】論文
これらが今読んでいる論文です。
- 画像処理教本4章を読む。
- ゼミ用にスライドを作る。
以上の2点が今週の課題です。
張先生へのリンク
10/20
1.進捗はありません。
2.張研ゼミで指摘して頂いた点を修正しました。
10/21
1.4章を読みました。
2.スライドの細かな点を修正しました。
10/22
1.進捗はありません。
2.スライドを一通り作り終えました。>>
スライドのリンク
10/23
1.進捗はありません。
2.ゼミで質問された点をまとめました。>>
リンク
10/24
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
10/25
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
10/26
今週の予定が終了したので、これまで作成したプログラムの効率化を図っています。
今週の課題
1.先週出た問題を解決する
2.修復順のアルゴリズムを考える
10/15
計算時間が長すぎる原因を理解した,その原因はパッチの大きさとexampleウィンドウの大きさだった。そこで、違う大きさのパッチで実験し、現時点で最適なサイズを選んだ。修復の結果と循環の回数を考えて、パッチのサイズは破壊された部分の40分の1を設定します。
10/16
不自然な部分の修復の原因を理解して、一つ一つパッチで进行实验実験を行う。原因は理想的なexampleと、選んだexampleの既知の部分が非常に似ていた。exampleウィンドウを大きくなると結果がよくなる。
10/17
修復順部分のアルゴリズムを作成中
研究テーマ
「視覚障がい者向けタッチパネル操作支援システムにおける画像認識部の開発」
課題
1. 複数バーコードの認識動画を撮影するための回路作成(音+ディスプレイ表示+7segLED表示)
2. 必要なボタン領域の検討
10/20
1.回路を作成したが、表示が上手くいかず、例えばRとGの場合だとそれぞれの表示が混ざったように光ってしまっている。原因を究明中。
2.進捗なし
10/21
1.簡単な7segLED表示回路をいくつか作って検証した結果、表示の切り替え速度が速すぎたみたいだった。
2.進捗なし
10/22
1.取得中のバーコードの7segLED表示が行えた。39パターン全て正しく表示されることを確認した。
2.進捗なし
10/23
1.完了しました。
2.ボタン領域を求めるためのデータを整理した。
10/24
1.完了しました。
2.指の速度とはみ出し距離のデータを元にボタン領域を検討し、八割方まとめた。
展示会用のプログラムを作製すること
TOEICの勉強をすること
以上の2点が今週の課題です。
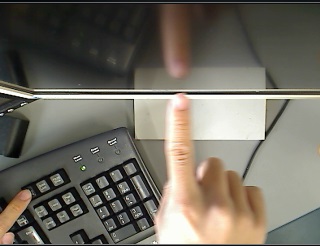
1.について、以下のようなアルゴリズムでの作製を検討しています。
- フレーム間差分で動いている物体の輪郭を取り出します。
- ラベリング処理とヒストグラムの解析を行い、指と反射像の座標を取り出します。
- CamShiftかテンプレートマッチングを用いて指先と反射像の追跡を行います。
10/15
1. パーティクルフィルタによる物体追跡を検討しました。パーティクルフィルタによる物体追跡のプログラムを作成しました。
2.模擬問題を解きました。
10/16
1. フレーム間差分のプログラムで輪郭を取り出すことが出来ました。
2.模擬問題のやり直しをしました。
10/17
1.ヒストグラムを表示させることが出来ました。
2.進捗はありません。
10/18
1.進捗はありません。
2.リスリング問題を解きました。
10/19
1.ラベリング処理のプログラムを書いています。
2.リスリング問題を解きました。
10/20
{{unknown}}