研究
テーマ:「機械学習とドローンによる屋外駐車場管理システムの開発」
1、ドローンによる空撮で、駐車場の空きを監視する→定点カメラでは死角ができる可能性があるので効果的だと考えた。
2、駐車券にQRコードなどをつけて、スマホで読み取って、ドライバーに空き状況がわかるようにする。→ドローンによる誘導も考えたが、連続して車が入ってきた場合にドローンを複数台用意しなければならないと考えた為。
就活
・SPI勉強中
・NTT西日本インターンシップ参加中→お昼からフィードバック面談あるので途中でゼミ抜けます
・ES結果待ち:日鉄ソリューションズ、SCSK
・コーディングテスト結果待ち:日本総合研究所
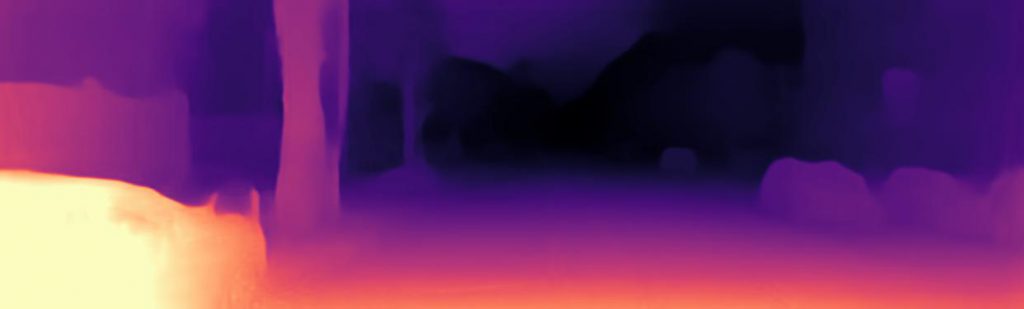
Optimize network structure and loss function. Compare and evaluate output depth map.
- Observing with eyes, I think my depth map is better than monodepth2.
- But in the evaluation, my result is worse than monodepth2.
- For the same network, the evaluation value of the model trained by myself is worse than the … Continue Reading ››
- 今週のゼミ発表に使うPPTを作ります。今回の発表準備の内容は課題の研究進捗の紹介だけではなく、以前の仕事に合わせて人工知能学科に対する認識、特に深さ学習方法の使用について話したいので、時間がかかります。
- AROB-2020論文の作成。
画像内において、座っている人を認識するプログラムを作成中。そのためのデータセットを探している。
- 融合科目の報告書を整理して張先生に提出する。
- 総合実験に関わる歩行者検査と再認識のネットワークモデルを引き続き最適化し、同時に論文を書く。
- 論文《Diagnosis of Breast Cancer from Mammogram Images Based on CNN》を読んで、意見を出しました。これはいい論文だと思います。
進捗と課題
- 投影対象の回転に対応して投影画像を回転させるプログラムの作成に難航中。
→ 現状では、0°~89°までの回転ならば対応可能。
→ 中心点が同じ2つの四角形A・Bの四角形Aを基準とした四角形Bとの角度(回転角度)を算出する方法を模索中。何か方法をご存じでしたら、教えて頂きたいです。
- Learn to write article with LATEX.
- Optimize the network by joining different edges
 input
input
 output of my network with different edges from Canny
output of my network with different edges from Canny
![]() Continue Reading ››
Continue Reading ››
画像認識のプログラミングの学習
Spyderの操作確認
画像処理のプログラミングの学習
gitにあるソースコードをvisual stadio にて動作確認
プログラミングの基礎から勉強し直した。
Stay Hungry, Stay Foolish!
