進捗
オムロンの面接を行った。
予定
月曜日から京セラの2ndステージに参加しています。
ゼミを欠席、授業を途中退席させて頂きますm(__)m

進捗
オムロンの面接を行った。
予定
月曜日から京セラの2ndステージに参加しています。
ゼミを欠席、授業を途中退席させて頂きますm(__)m
[研究]
・進捗なし
[就活]
・日鉄プラント設計のOB訪問会に参加
・授業の一環で、ゼンリンの企業研究を今まで以上に行った。
研究
進捗無し。冬のインターンの申し込みが大体終わったので今週から再開したい。
就活
・日立製作所キャリアセミナー:ES提出
・富士通冬インターン:ES提出
・NECソリューションイノベータ:個別面談してもらった→1月中旬に再び面談
その他
二石と新山田とチーム組んで「IoT/AI/5Gビジネスプラン・コンテスト」の予選通過したので頑張って10万円目指します💪💪💪
出席:大城、林、新野、戸村、井川。 欠席:古川(体調不良?)
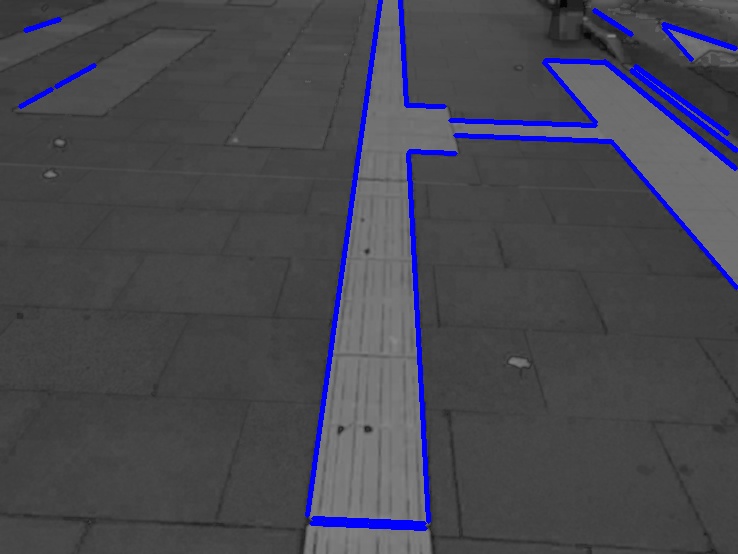
大城:点字ブロックのエッジ直線を検出し、被験者はすでに点字ブロックの上に立ち、これから行く方向の点字ブロック上に障害物があるかを検出する。直線検出はLSD(Lind Segment Detector)を用いて検出する。画像は直線検出する前に、色変換やフィルタリングなどの処理をし、精度よく直線検出を行なっている。検出直線の傾きを制限することで、人が行く方向の点字ブロックのみ注目し、検出エリアに障害物あるかを判断する。次週は点字ブリックの領域の決定を行う。
林:ヒアリ→ヒメアリの分類ではなく、特定一種類のあり→他種類のアリの分類に重点を置く。次週までに用語の勉強。
新野:OpenPoseを使って、関節情報を抽出し、体の向きを検出する。肩と肘と手首の座標で判断する。一般的な場合手を体の前にあった場合、手が肘に対して前にある方が向きです。次週はBlaze Poseを試すと実際のプログラムを実行時の状況に応じてを次手を考える。
戸村:研究方針転換について、ての検出と皿の位置関係の判断は短時間で終わらないかもしれないので、院のテーマに持っていくことをお勧めします。現在はコロナ感染防止のために、スマホ一台で飛沫感染を防止する視点で有用性に焦点をを当てよ。
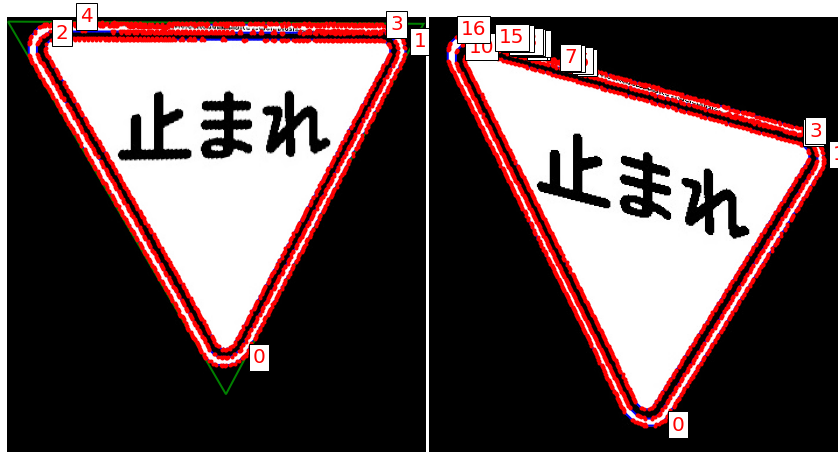
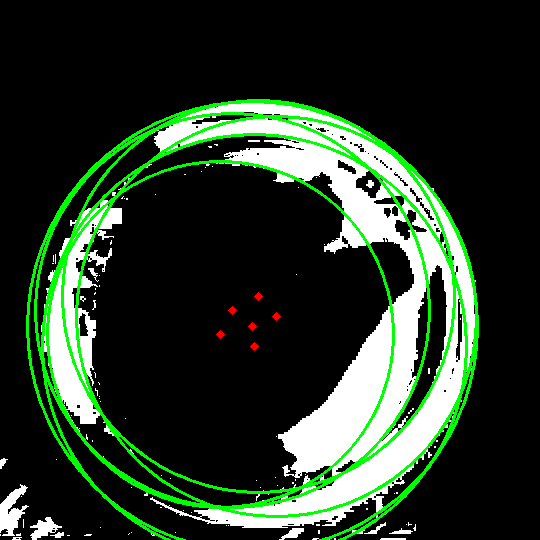
井川:三角形の標識を形状認識の前に知らない情報ですので、三角形である前提で検出することはこのましい処理手順ではない。せめでいくつかの定型形状があって、その中で判断した結果でないと使えるものになりません。



CNNにおける『ヒアリ』と『ヒメアリ』を分類するプログラムの作成
現在の課題:
①今回のヒアリ識別システムにおけるCNNのモデルを構築するための知識が不足
→今週中までに本にて学習
②前回のゼミで指摘されたテーマと研究の方針の違いついて
→具体的な解決案は未定
ブロックの淵の直線を検出する。
中央下部分の範囲を指定し処理を実行し、目的の直線のみ得られるように調整(画像無し)

1.AROB_2021論文を完成しました。今週の木曜日、17日に最終提出が必要です。この数日間は真剣に修正しなければなりません。
2.AROB_2021のスケジュールはすでに発表されました。1月22日(金)にオンラインで発表しますので、出来るだけ早くPPTと練習発表を準備しなければなりません。10分間の講演時間と5分間の討論時間があります。
3.また年末になりました。まとめが必要だと思います。この一年間の勉強、研究、生活など...
・今週の進捗
「止まれ」の標識について、正面からとられた形に変換、分割してマッチングを行う所まで進めた。
ドライブレコーダーによる標識のサンプルを撮った。
・課題
標識外の部分においてマッチングをしないような分割の形成