- I searched the lidar-camera fusion calibration method. Matlab and ros both have the calibration bag.
- With the calibration data, the 3D lidar points can be projected to 2D images. So I read a mutil-stage 3D detection paper:"Frustum-PointPillars: A Multi-Stage Approach for 3D Object Detection using RGB Camera and LiDAR". This work used … Continue Reading ››
日別アーカイブ: 2022年2月3日
先週の進捗(ZHOU)
- Using the light weight MobileNet as the encoder for depth predicting.
- In the decoder, using depthwise and pointwise convolution replace the traditional convolution.
- The result shows that the light weight network can achieve comparable accuracy via the instruction of a strong network.
週報(YANG)
6 best approaches proposed recently
- Shapelets
- Shapelets can be broken down into Shape and let, Shape is shape, -let means the suffix "small", and Shapelet represents the "small shape" of the time series, that is, a subsequence. This subseries are a special sub-sequence of this time series data that expresses the … Continue Reading ››
- Shapelets can be broken down into Shape and let, Shape is shape, -let means the suffix "small", and Shapelet represents the "small shape" of the time series, that is, a subsequence. This subseries are a special sub-sequence of this time series data that expresses the … Continue Reading ››
週報(大塚)
・卒論執筆中
原理と考察が終わってない状態で24ページぐらいです。
今週中には1回目の執筆が終わると思います。
考察が書きにくかったのでデータを解析し直してます。
週報(白川)
・論文執筆(現在25ページ)
→回路図を作成するのにおすすめのものを教えていただきたいです。
金曜までに一度完成させます。
近藤の週報(1/27 ~ 2/2)
卒論執筆中
現在20ページほどです
金曜までには、一度書き終わらせます
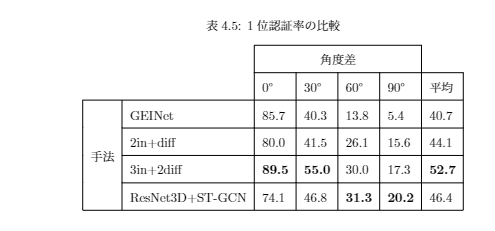
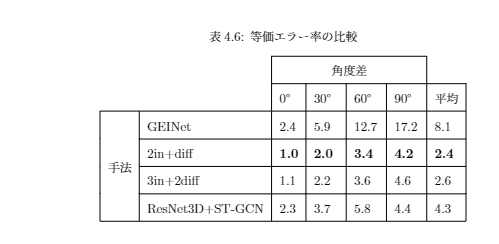
90°だけのデータで学習するのはうまくいきませんでしたが、0、30,60,90°のデータで学習して部分的に従来手法の精度を超えれました。