
Ran BEVFusion with TensorRT + ROS2 successfully.
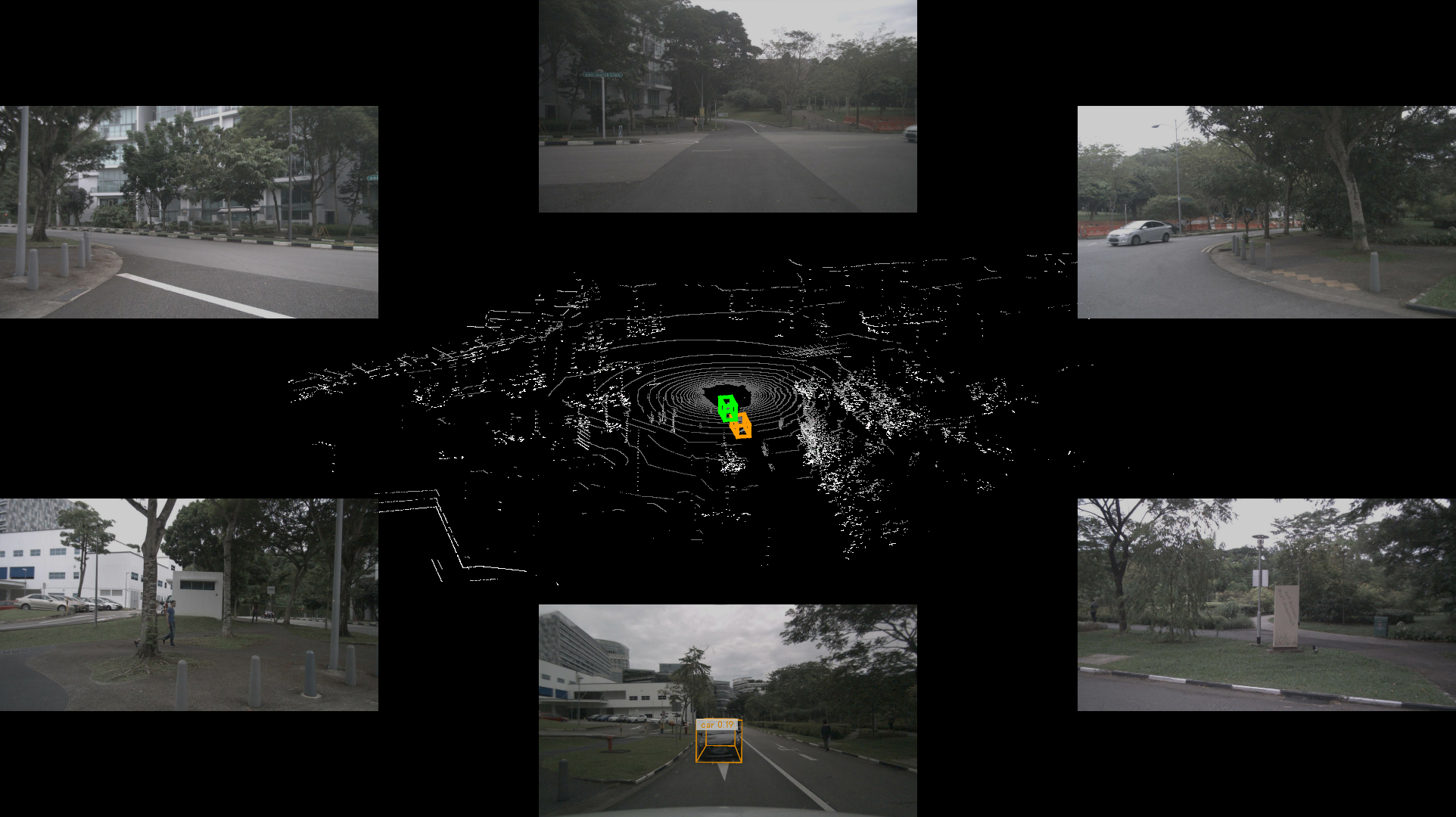
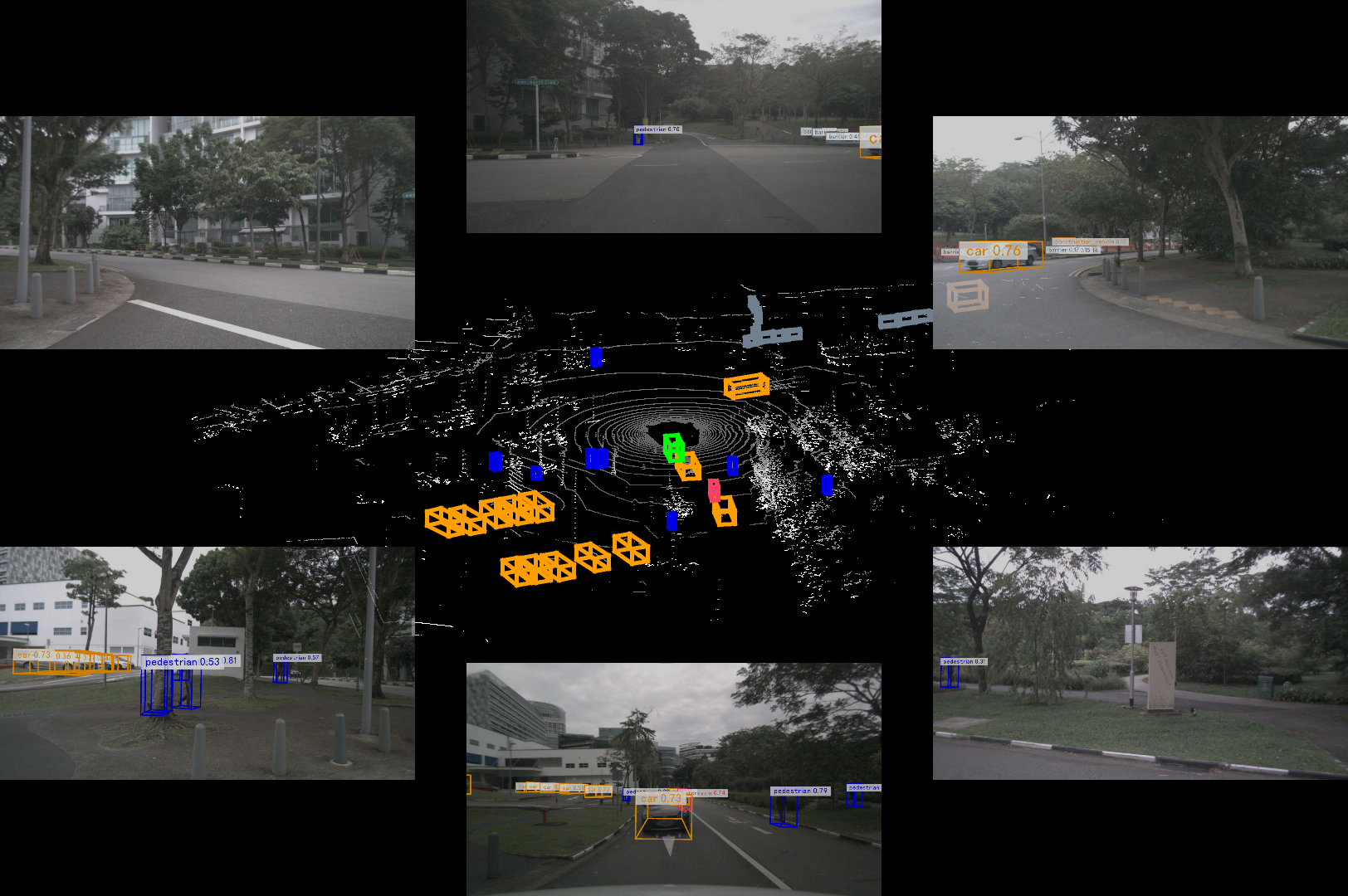
But the result has some differences with the original compiled code. The first image is my result. It only detected two objects, while the official code could detect more objects.
I will keep on finding solution.