
- 超解像技術の再現プログラム作成
- 画像処理教本
- 卒論の背景などを作成する
「研究相談」カテゴリーアーカイブ
研究に関する相談事項
研究の進捗状況[11/10~11/14](田中)
[今後の予定]
PIC→PSoCの移行に伴って機能の拡張および追加を行う。
追加・・・LCD、シリアル通信
その他にもあれば随時追加していく。
11/10
授業の課題に時間がかかったため、進捗はなし。
11/11
XBeeを用いた無線通信を行おうと思ってシリアル通信のビットレートを8000[bps](1000[baud])→76800[bps](9600[baud])へと変えたが
問題なく変更できた。
XBee側の設定など必要かどうかを確かめた後、LCDに文字列を
XBeeで送信できるかどうかを確認する。
11/12
山脇先生に今後の展開などを聞いたところ、ロボット⇔充電システムで
やり取りをするなら、無線ではなく、有線でやるが信号線と
通信線を一体化してみてはという意見を貰ったのでそれをまずは
実行することにした。
そこで、修論で行うことを以下のものに決定した。
<機能>
・充電が接触するだけで行える
・充電システムは1度に4台まで充電可能
・電流、電圧値を指定することが可能
・どのターミナルを使われているかどうかを認識および
ディスプレイ(もしくはLEDなど)に表示することが可能
・ロボット⇔充電システムは通信できるが無線ユニットは用いずに
接触した際に通信が行われる
そのほかの機能が見つかれば随時、検討していきたい。
11/13
ロボット⇔充電システムは通信できるが無線ユニットは用いずに
接触した際に通信を行う
為の機構を考えていた。
ロボット側でいつ通信を始めるかの同期が取れないのでは?と
指摘を貰った。そこで12日に考えていたものを説明したが
それでは出来ないとのことだった。
明日以降で、新たな方法を考えていく予定。
11/14
共同研究の話し合いをして、どれを実際にデモ機を製作してどれを
アイディアの提案にするのかを話し合い、決定した。
来月、今回話し合って分けたものをどのように実現させるかを
話し合っていく予定。
今週の課題(横山) 11/10~11/14
課題
複数の光源を用いたキノフォームの再生像を改善する
11/10
 1つのホログラムを配置した出力画像(128×128)
1つのホログラムを配置した出力画像(128×128) 11/11
11/11
 原画像の高周波成分(エッジ部分)によるギブス現象(原画像領域の光の強度のばらつき)を抑えるため、原画像をぼかして入力しなければならない。ガウシアンフィルタまたは中野さんの先行研究について学ぶ必要がある。
11/12
原画像の高周波成分(エッジ部分)によるギブス現象(原画像領域の光の強度のばらつき)を抑えるため、原画像をぼかして入力しなければならない。ガウシアンフィルタまたは中野さんの先行研究について学ぶ必要がある。
11/12
 出力画像(128×128)
出力画像(128×128)
- フーリエ反復法の実装完了
- 中心にのみ配置したホログラムによる再生像と比較できるように改良
1つのホログラムを配置した出力画像(128×128)
11/11
- スペックル除去法を用いてキノフォームを再生
原画像の高周波成分(エッジ部分)によるギブス現象(原画像領域の光の強度のばらつき)を抑えるため、原画像をぼかして入力しなければならない。ガウシアンフィルタまたは中野さんの先行研究について学ぶ必要がある。
11/12
- 入力画像をぼかすことによる再生像の影響について学習した。
- OpenCVのガウシアンフィルタを入力画像にかけて、再生像の検証を行う。
- 卒論および3月の国際学会に向けて論文の構成を考えておく。
- レーザダイオードアレイの干渉性について調査する。
- 光源数を増やす(ホログラム点数を小さくする)影響について検証する。
- プログラム内で入力画像にガウシアンフィルタをかけるようOpenCVを利用して記述した。
- 各繰り返し回数およびガウシアンフィルタのパラメータを変更しながら出力画像データを集めた。
- 集めた画像データから、小さなカーネル5×5のガウシアンフィルタを原画像に用いて入力すると出力画像から十分にノイズが取り除かれることを確認した。
出力画像(128×128) 今週の課題(大西)11/10~11/14
- Texで卒論作成を進める
- 全体ゼミ発表用のスライド作成
今週の予定(尾崎) 11/10~11/16
1.文字特徴を考慮した連結成分を抽出するプログラム作成
2.研究の背景部分をまとめる
11/10
1.作成中です。
2.進捗はありません。
11/11
1.作成中です。
2.進捗はありません。
11/11
1.作成中です。
2.スライドにまとめています。
11/12
先週わからなかったorder[]について陸さんにアドバイスをいただいたので、order[]について調査しました。
11/13
1.作成中です。
2.進捗はありません。
11/14
order[]について調査しました。
今週の課題(11/10~11/14) 三﨑友樹
(今週の課題)
- 修論作成スタート(背景部)
- 今までのプログラムは入力に平面波を用いている。これをキノフォームにする
- 進捗なし
- 今までのデータの整理を行った
- 進捗なし
- ガウシャン半径の値を変化させてデータを取得した
- 進捗なし
- プログラムの修正(まだ完成していない(50%程度だと思う))
- 進捗なし
- プログラムの修正(ガウシャン分布部)
- 進捗なし
- データの取得
今週の課題(西澤)11/10~11/16
課題
・VRAMの切り換え
11/10
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
VRAMとディスプレイのIFの作成をすすめた。
先輩にご指導いただき、構文エラーを解決できた。
11/11
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
VRAMとディスプレイのIFの作成をすすめた。
テストベンチにて簡易的な動作の確認ができた。
11/12
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
ユーザーHWとVRAMのIFの作成をすすめた。
11/13
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
調停の部分の作成をすすめた。
11/14
・VRAMの切り換え(Vivado)(FPGAボード:ZYBO)
山脇先生にご指導いただき、ポートの修正をした。
調停の部分の作成をすすめた。
11/15
進捗なし。
11/16
進捗なし。
今週の課題 (合田 佑司) 11月10日〜11月16日
テーマ
画像処理を用いた車両速度測定システムの開発今週の課題
- Raspberry piを用いて、シャッタースピードを変化させた画像を撮影する
- Raspberry piを単独のカメラとして動作させるようにする
- 実際に車両を撮影して検証する方法を考える
11月10日
1. シャッタースピードを変えるコマンドを探した 2. できていない 3. 簡単な道路と車の模型を作成し、その上で車にライトをつけて動かすという方法を考えた。ライトと動く車は必要であるが、検証が楽になると考える。11月11日
1. Raspberry Piとカメラで写真を撮っていたら、"Received unexpected camera control callback event, 0x4f525245"、というエラーが出て写真が撮れない状況になった。同じ症状の人がネット上で見つかったが、ソフトのアップグレードや、カメラの繋ぎ直しなどの解決方法しか提案されていなかった。 2. できていない 3.できていない11月12日
1. 解決案を試したが、やはり解決しなかった。別のRaspberry Piで試してもカメラが起動しないようであれば、カメラが壊れた可能性がある。もし、動けば、自分のRaspberry Piが原因なので、OSからインストールし直す必要がある。 3. Raspberry Piで撮影するためには、スイッチを付けなければパソコンからコマンドを送信しなければならない。ただ、一度は外でシャッタースピードを変更して撮影する必要がある。微調整については、模型を作成する方法がベストだと考える。 模型に必要な、ラジコンカーなどを持っている方がいれば、よろしくお願いします。11月13日
1. Raspberry Pi用のOSを再インストールしたり、ネットに載っている対策を試してみたがやはりエラーが治らなかった。別のRaspberry Piにカメラをつないで試してみたところ正常に動作したので、カメラよりも、Raspberry PiとOSの問題の可能性が高い。別のRaspberry PiにOSの入っているSDカードを挿して動作した場合は、Raspberry pi自体に問題がある可能性がある。 2. 進捗はない 3. ラジコンカーを楊先生から借りれることになったので、模型を作っていく。11月14日
1. 別のRaspberry Piで試してみたところ、カメラは正常に機能した。Raspberry Piに問題があると考えられる。別のカメラでシャッタスピードを調整するコマンドを追加して撮影すると、うまく撮影することができた。次は、実際に道路で試す必要がある。11月15日
1. Raspberry Piを用いて、夜間走行中の写真を撮影してみた。シャッタースピードを1秒に設定して撮影を行ったが、光を取り込む量が多く、光の塊のように写ってしまった。線として撮るには、カメラの感度を調節する必要がある。
今週の課題(東中)11/10~11/17
テーマ:オフサイドの自動検出
今週の課題
1.オフサイドポジションの判定
2.追跡する領域の検出
これらを中心に行う予定です。
11/11
追跡する領域の検出のプログラムを修正しました
11/12
ボールを追跡するプログラムを作ろうとしましたが上手くいきませんでした
11/13
進捗はありません
11/14
ボール状態を推測する方法を検索していました
11/15
2.の結果が出たので添付します
 これをユニフォームの色を用いて、チームごとに検出します
これをユニフォームの色を用いて、チームごとに検出します
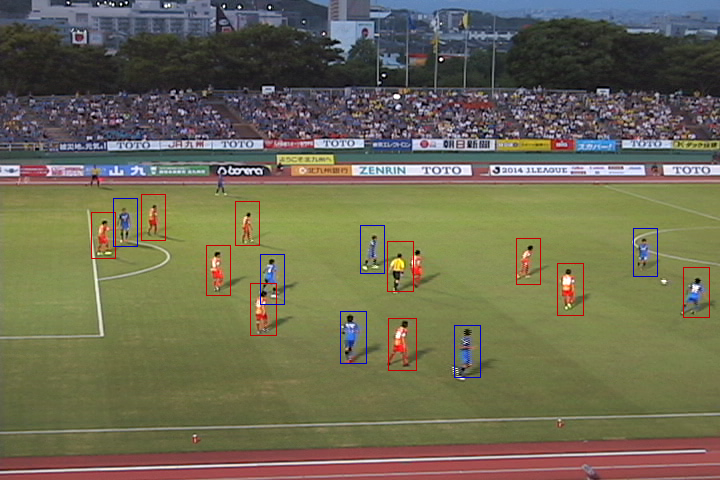 多くは正しく検出できていますが審判の判定、遠くにいる選手などに問題がみられます。
多くは正しく検出できていますが審判の判定、遠くにいる選手などに問題がみられます。
これをユニフォームの色を用いて、チームごとに検出します
多くは正しく検出できていますが審判の判定、遠くにいる選手などに問題がみられます。 今週の課題(陳慎静)11/3~11/9
(今週の課題)
ラベリングによる指先の位置特定
以上が今週の課題です。
11/3
進捗はありません。
11/4
進捗はありません。
11/5
進捗はありません。
11/6
ラベリング処理のプログラムを作成しました。
11/7
進捗はありません。
11/8
進捗はありません。
11/9
ラベリング処理のプログラムを作成しました。
ラベリング数がおかしいので原因を探しています。