課題
1.光学実験のためのホログラムの生成
2.複数の光渦をどこまで近づけて生成できるかの確認
11/5
1.生成中
2.進捗なし
11/6
1.生成中
光学実験の準備を行いました
2.進捗なし
11/7
授業の課題をおこなっていたため、進捗はありません
11/10
1.光学実験において再生像の確認を行い、機器が壊れていないかどうかの確認をおこないました。実際に再生した像は、厳密に軸や距離を合わせておらず、ホログラムを斜めにし反射させているためノイズがのっていました。
2.進捗はありません
11/11
1.光学実験のために、Fの白の領域が一定位相になる再生像を軸外に再生できるホログラムを作成中。
2048×2048[pixels]の入力画像を5000回繰り返し行うため、時間がかかり、あまり進んでいません。
2.進捗なし
11/3実験の結果を整理しています。
11/4実験の結果を整理しました。
11/5今週のゼミ準備しています。
今週のゼミppt
11/6 魚の写真を整理しています。
11/7魚のデータを整理しました。
1,関連論文を読む。
2,スライドを作成する。
3,画像処理教本の5章を読む。
11/4
進捗はありません。
11/5
1,関連論文を少し読みました。
2,スライド作成中です。
3,進捗はありません。
11/6
1,関連論文を少し読みました。
2,スライド作成中です。
3,進捗はありません。
11/7
1,関連論文を少し読みました。
2,進捗はありません。
3,進捗はありません。
11/8
1,関連論文を読み終わり、まとめました。
2,進捗はありません。
3,進捗はありません。
11/9
1進捗はありません。
2,スライド作成しました。
3,5-2まで読みました。
- Adaboostでの顔検出を行う
- 教本5章を読む
- TOEICの勉強をする
11/4
授業レポートをしていました
11/5
- adaboostのプログラムについて調べています
- 5-1を読みました
- 進捗はありません
11/6
- 静止画の顔検出のプログラムを組みましたが表示されずにコードが終了したので原因を調べます
- 進捗はありません
- 進捗はありません
11/7
- 原因を調べています
- 5-2を読みました
- リスニングをしました
11/8
進捗はありません
11/9
進捗はありません
今週は検出プログラムを完成させようと思っています。
11/4
なかなかエラーが直せないでいます。
11/5
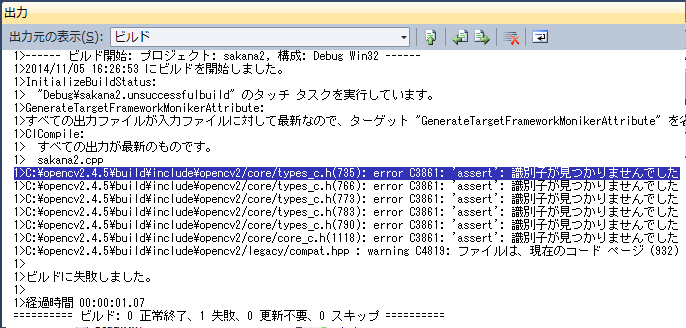
このエラーに悩まされています。
このエラーは一体どうすればいいのか教えてください。
自分は機械学習をするためにのVisualstudio2010や2013をダウンロードしたせいでエラーが出ているのではないかと思っています。
今
コチラを見ているんですがどう思いますか??
11/6
調べた結果visualstudioを再インストールして見ることにしました。
11/7
再インストールしたがうまくいかず。
学祭の準備をしました。
11/8
11/9
①出張②大学院講義レポート閲覧③実験、講義④ウェブ研究進捗確認⑤画像ゼミ11月6日午後予定
11・4 ①遂行②一部遂行④一部遂行
11.5
課題
複数光源を用いたキノフォーム作成のためのプログラム記述
11/4
ホログラム面の配置を変えて、原画像領域を表示できるようになるプログラムを作成した。
11/5
作成したプログラムに修正を加え結果を出力して正しく動作するか確認した。
原画像(64×64)
1、
中心にホログラムを配置した位相分布
2、
右下にホログラムを配置した位相分布
3、
上にホログラムを配置した位相分布
以上3種類をそれぞれフーリエ変換すると同様の結果が得られた。
原画像領域出力画像(64×64)
11/6
ホログラムの配置を変えた再生像の合成ができるようにプログラムを書き換えた。
11/7
プログラムの出力を確認し、計算機ホログラムにおいて今週作成した手法(ダミー領域内において配置を変えた複数のホログラムから得られる再生像を合成)が有効であることを確かめた。
ダミー領域を含む出力画像(512×512)
1.閾値処理のプログラム作成
2.文字特徴を考慮した連結成分生成のプログラム作成
11/3
1.進捗はありません。
2.ラベリング処理のプログラム作成中です。
11/4
1.
Automatic character detection and segmentation in natural scene images この論文の65ページにあるOrder[ ]の部分がわからなくて躓いています。Orderがどういったフィルタなのかわかりません。
2.大まかなラベリング処理のプログラムが完成しました。明日から文字特徴を考慮したプログラムの作成に入ります。
11/5
1.進捗はありません。
2.プログラム作成中です。
11/6
1.論文にあるOrderについて調べてみましたが、やはりよくわかりません。わかる方がいましたら教えてください。
2.プログラム作成中です。
11/7
1.進捗はありません。
2.プログラム作成中です。
テーマ
画像処理を用いた車両速度測定システムの開発
課題
1. Raspberry Piのカメラモジュールについて学ぶ
2. 撮影環境と条件について考える
3. カメラモジュールを用いて車両を撮影する
11/3
できなかった
11/4
1. カメラモジュールを接続して撮影を行った。画像の取得には成功したが、撮影後にRaspberry piがフリーズするという問題が発生した。調べてみると他にもこのような症状が出ている人の投稿があったが、解決策は分からなかった。
2. リモート接続で撮影した画像を、ホストPCに転送することができたので、Raspberry piで撮影した画像をPCに転送して処理するという流れはできそうである。撮影時にセンサなどで車両の接近を調べる予定だが、使用するセンサなどを考える必要がある。
また、埼玉県で新しく移動式のORBISが試験運用されることがわかった。レーダ式を用いてるが、かなり小型になっており、設置条件などで、メリットを出す必要がある。
11/5
1. 他の人たちの症状では、カメラが起動後フリーズして、画像の取得もできないという症状だった。しかし、自分の症状は、フリーズした後、再起動すると画像自体は生成されていた。カメラとRaspberry piで使用する電源では800[mA]と書いてあったが、供給している電源が600[mA]ということが原因の可能性がある。
11/6
1. 電源を1[A]に変えると、うまくカメラが作動した。撮影画像は、raspberry piにインストールしたsambaを用いて共有フォルダを作成して、そこに画像を作成して、パソコンで取得する形をとる。
2. 電源を用意して、raspberry piを単独で動かせるようにする必要がある。道路の正面に設置し、センサで車両の接近を感知したらraspberry piに撮影のコマンドを送信する。
11/7
11/8
11/9
今週の課題は
1.オプティカルフローの計算をするプログラムの作成
2.
コレクションフロー法を読む
コレクションフロー法で使われている文献3,4,15はそれぞれ
3,
High accuracy optical flow estimation
4,
Combining Local and Global Optic Flow Methods
15,
Exploring New Representations and Applications for Motion Analysis
です。
11/4
1.オプティカルフローを計算するプログラムを作成中です。
一応プログラムは通ったのですが、所々手直しが必要
なので明日以降手直しするつもりです。
2.進捗はありません。
11/5
1.進捗はありません
2.読みました。これからの方針として、コレクションフロー法における
オプティカルフロー推定法を用いた表情の平滑化に焦点を置いて、
そこの精度を上げることにより新規性としていこうと考えています。
11/6
1.進捗はありません
2.読みました。
11/7
1.進捗はありません
2.読みました。オプティカルフロー推定法について書かれている4章を読んだのですが、いまいち流れがつかめません。
平行して学祭の準備にとりかかっています。
11/8
1.進捗はありません。
2.進捗はありません。
11/9
1.進捗はありません
2.進捗はありません
11/10
1.進捗はありません
2.オプティカルフローを計算して表示した画像の色が示すことがわかりました。
11/11
1.表情を平滑化するプログラムについて調査しています。
2.進捗はありません
11/12
1.いろいろな表情から無表情に変えるプログラムを作成しようとして
いるのですが、どのように組んでいけばいいかわかりません。
わかる方がいましたら教えていただきたいです。
オプティカルフロー推定を行い、その後画像に何か作用させる
のではないかと論文を読んで考えたのですが、そのオプティカル
フローを計算した後の処理がわかりません。
2.読みました。