
本日他人のデータを撮ってモデルの評価をしたいと思います。
週報(GAO)
1.update my flow
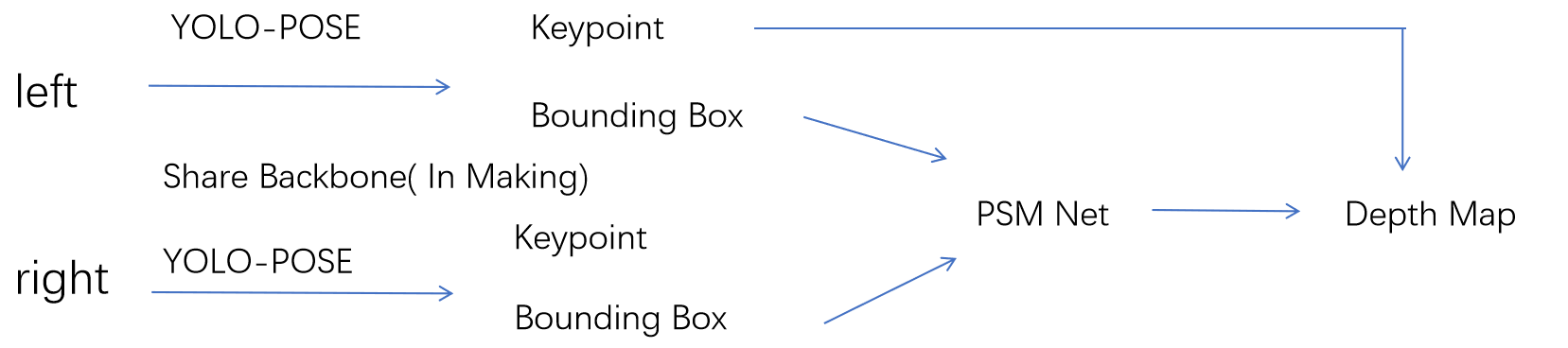
2.As what i do in the last work,using internal parameters to project the key point to make data.
3.Adding the stereo -> depth netwotk to obtain the depth map
週報(TANG)
Reading papers
Look Closer to Segment Better: Boundary Patch Refinement for Instance Segmentation
RefineMask: Towards High-Quality Instance Segmentation with Fine-Grained Features
Look Closer to Segment Better: Boundary Patch Refinement for Instance Segmentation
SegFix: Model-Agnostic Boundary Refinement for Segmentation
Real-Time High-Resolution Background Matting
Boundary IoU: Improving Object-Centric Image Segmentation Evaluation
Progressive Semantic Segmentation
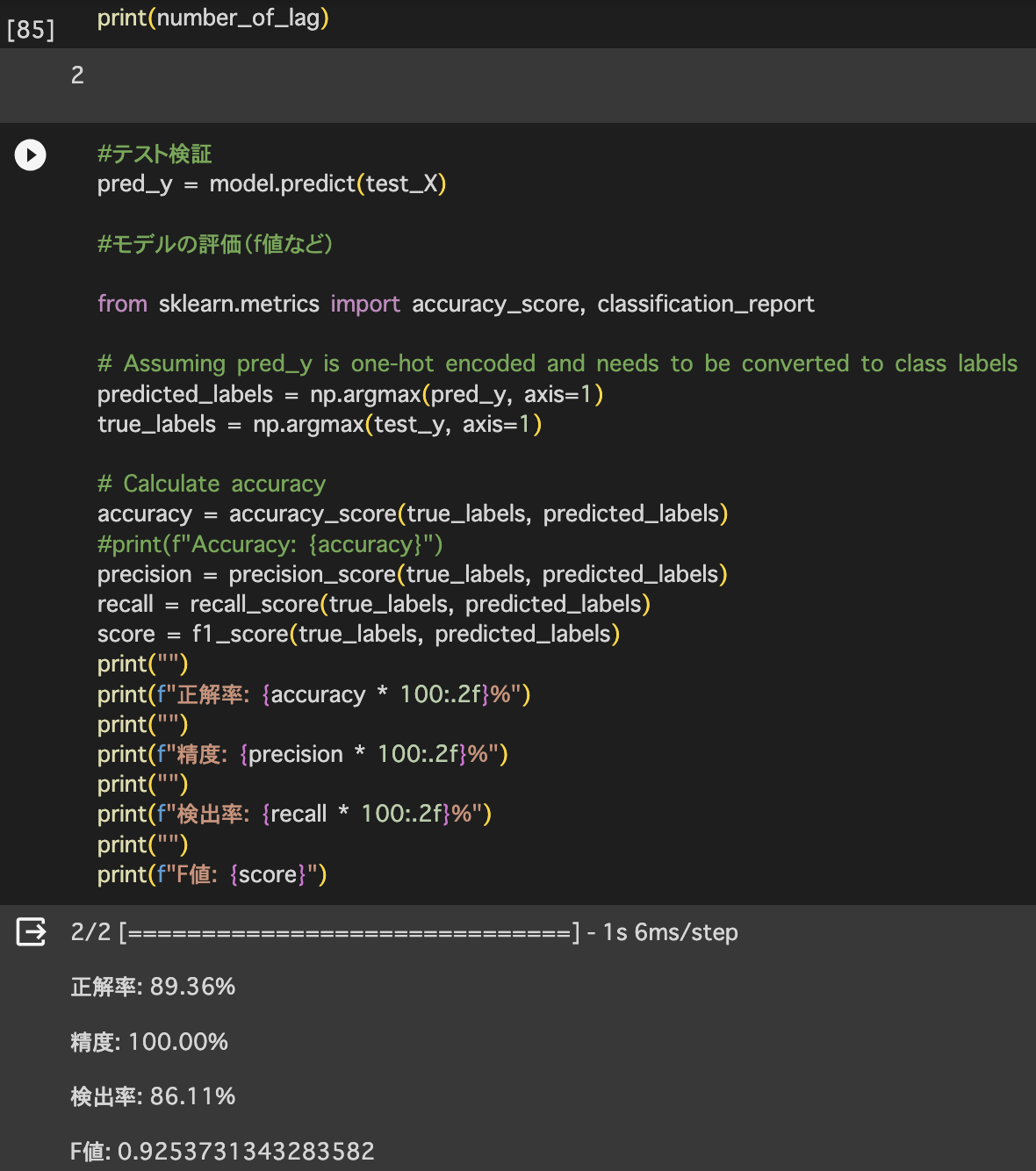
週報(豊永タカト)
データ増やした。複数のモデルで検証した。
Ridge,Liner,Ramdomforest,Deeplearningで試してみた。あまりいい結果ではなかった。
説明変数を改善した。少し結果が良くなった。
今週の進捗(根来)
ホンダインターン参加
カワサキ面接準備
座談会があるので遅れます
今週の進捗(藤崎)
テスト
エーアイネットテクノロジ
リクルートの方とのカジュアル面談があるため17時ごろから参加します。
週報(野崎)
中心窩画像処理の円モデル、楕円モデル、視野特性に基づいた楕円モデルを完成させました。
現在は視覚的に優れているWeierらの線形モデルを作っています。円形モデルは完成して楕円モデルを作っているところです。
週報(白川)#別日評価#データ削減
研究進捗
・別日に取ったデータを使いモデルの評価
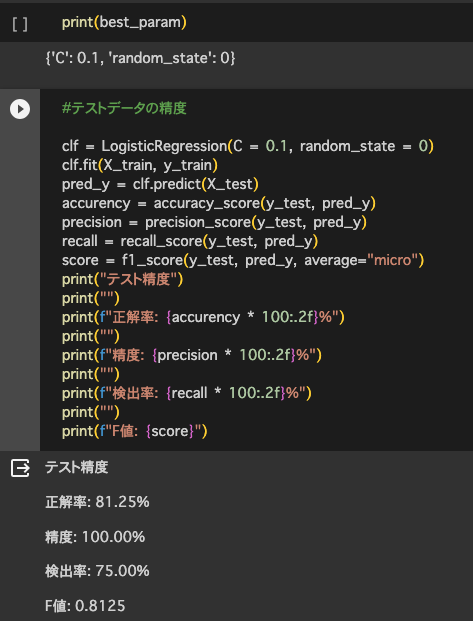
→ロジスティック回帰
週報(SUN YUYA)
We find a lot of methods of re-detection about Long term object tracking.
1 . ‘Skimming-Perusal’ Tracking: A Framework for Real-Time and Robust Long-term Tracking
The re-detection method:
After obtaining the best candidate in each frame, our tracker treats the tracked object as present or absent based on its confidence score and then determines the search state (local search or global search) in the next frame.
Key: Training a deep network(Verifier).
similarity
2 . SiamX: An Efficient Long-term Tracker Using Cross-level Feature Correlation and Adaptive Tracking Scheme
The re-detection method:
Exploiting threshold score.
3 . Combining complementary trackers for enhanced long-term visual object tracking
Running two trackers.
Training a deep network to decide when to re-detect.
4 . GUSOT: Green and Unsupervised Single Object Tracking for Long Video Sequences
Background motion estimation to predict location.
Evaluating two bboxes.
4 . High-Performance Long-Term Tracking with Meta-Updater
input: socre, response map, target object, template
model: lstm
output: score
5. MFT: Long-Term Tracking of Every Pixel
Optical flow is very important.
6. Multi-Template Temporal Siamese Network for Long-Term Object Tracking
Predicting trajectoyies.
The re-detection method:
Input: distance error
Output: Reliability Score
7. Multi-Template Temporal Siamese Network for Long-Term Object Tracking
Predicting trajectoyies.
The re-detection method:
Input: distance error
Output: Reliability Score
8. Robust Long-Term Object Tracking via Improved Discriminative Model Prediction
We augment various backgrounds that are not included in the search area to train a more robust model in the background clutter.
9. Robust Long-Term Object Tracking via Improved Discriminative Model Prediction
We augment various backgrounds that are not included in the search area to train a more robust model in the background clutter.
10. Target-Aware Tracking with Long-term Context Attention
The re-detection method:
P-mean_score:
score_list.append(out[“conf_score”])
score_num+=1
if score_num==10:
n=score_num
p_mean=0.0
for i in range(n):
for j in range(i,n):
p_mean+=(score_list[i]/(j+1))
p_mean=(p_mean/n)
score_num=0
score_list=[]
if p_mean<=0.58 :#and idx%5==0:
print(“global start ! seq_name : “,seq_name, ” “,frame)
out= global_tracker.track(image, info=None)
boxes[frame, :] = out[“target_bbox”]
local_tracker.state=boxes[frame, :]
Threshold:
11. Unifying Short and Long-Term Tracking with Graph Hierarchies
Difficult to understand.
WEEKLY REPORT (QI)
Run the Training and Testing on CenterPoint & Do research on Mmdetection3D
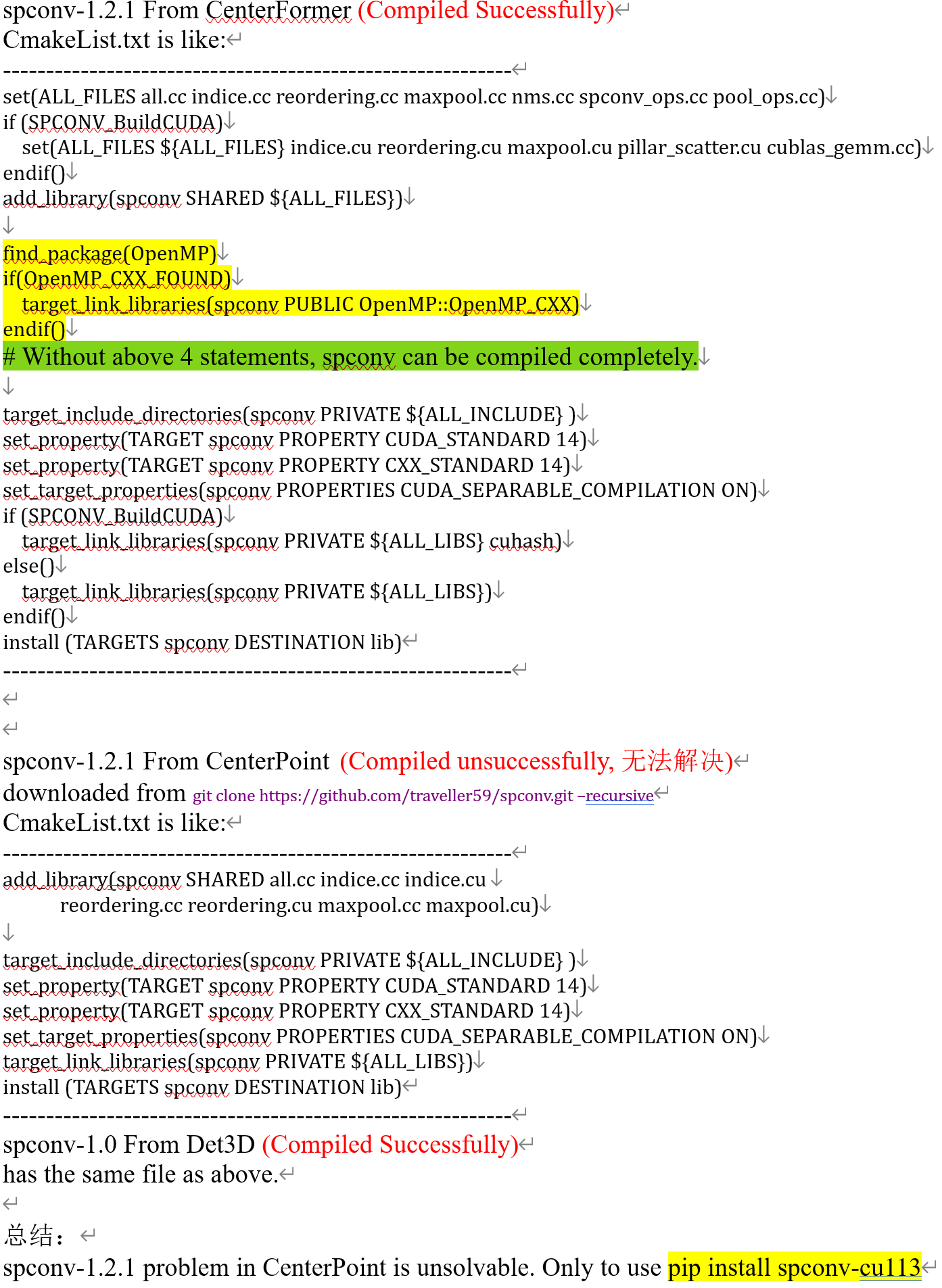
Solved the problems that the Spconv cannot be compiled:
Training the total dataset(nuScenes, 442.8GB) on RTX3090Ti cost me about 4 days.
![]()
Achieved the test results:
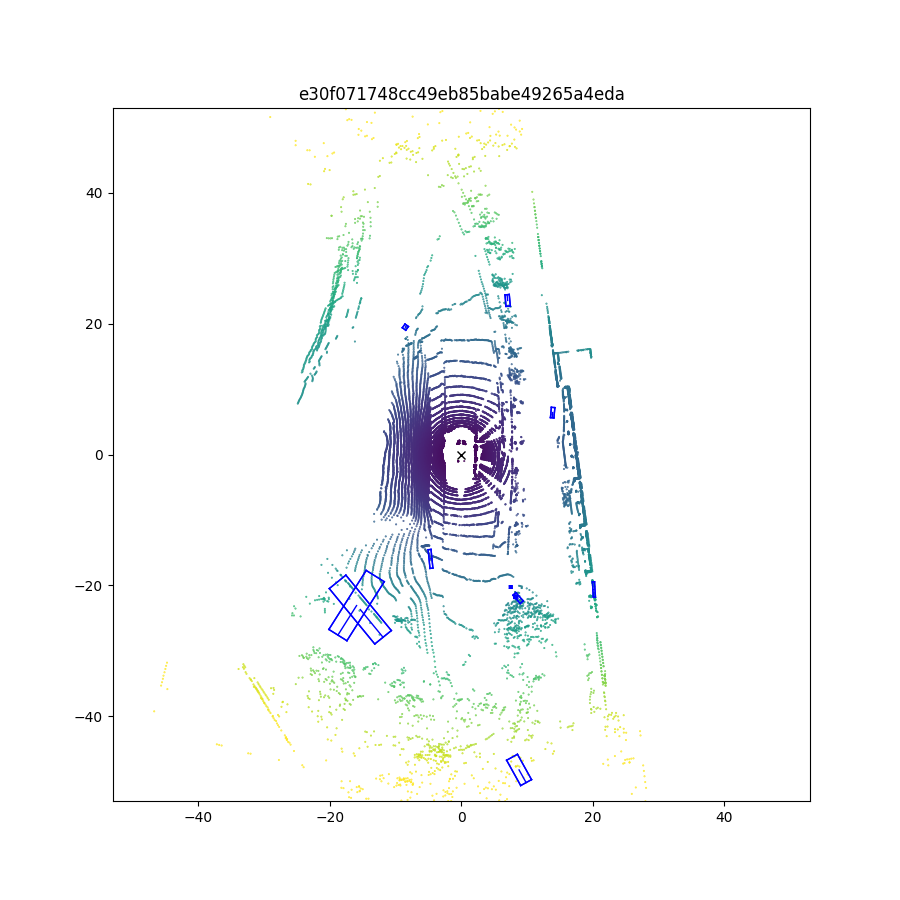
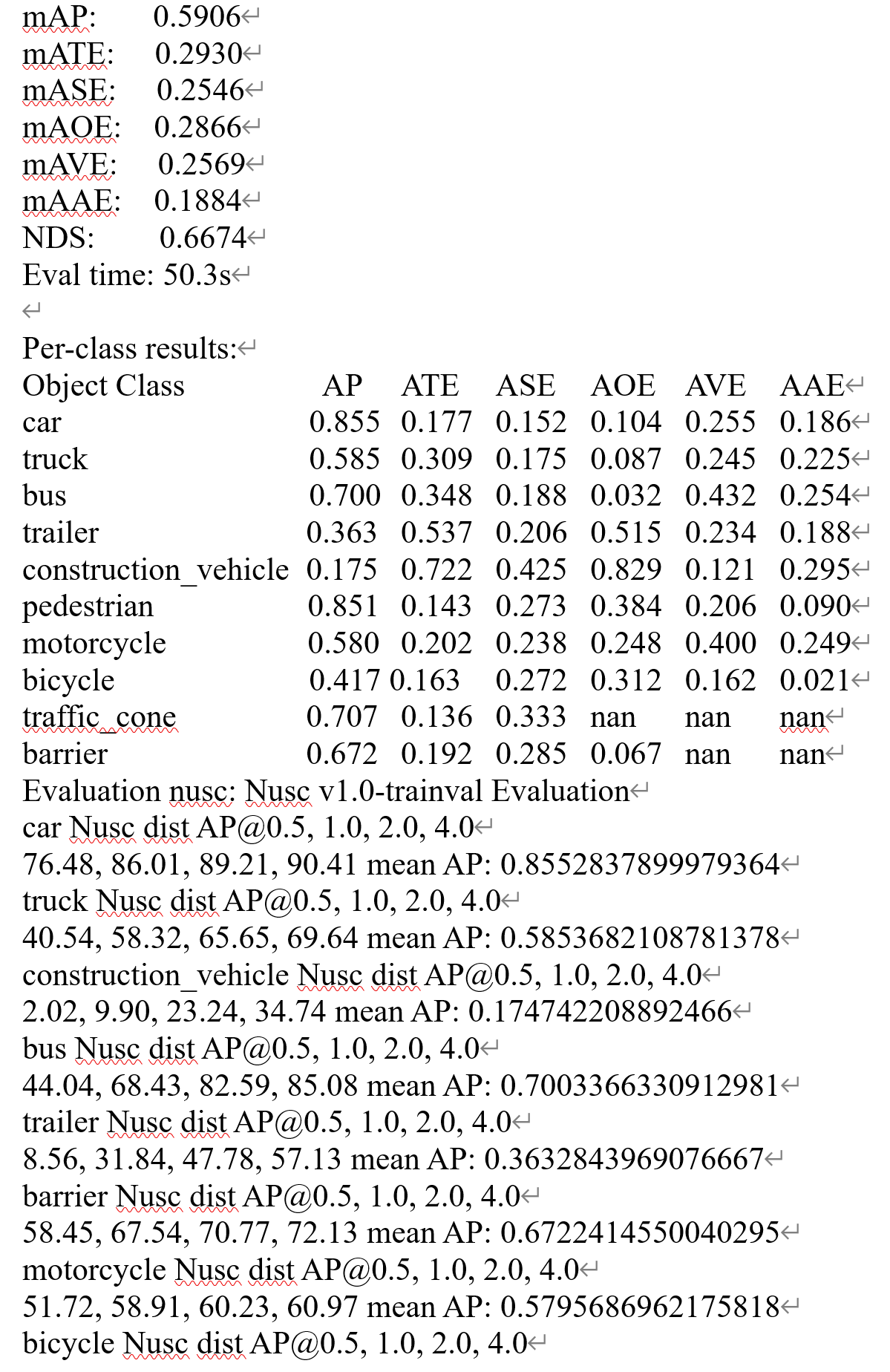
The result trained on my computer is almost similiar to the official result. Next, I will look for some advanced methods to modify the CenterPoint.
Recently, I was learning mmdetection3D.